








새로운 조립 라인을 설계하는 과정에서 설치 공간을 최소화하는 방법은 무엇일까? 그리고, 이렇게 고도로 통합된 라인의 생산성을 더욱 개선하는 방법은 무엇일까? 캐나다의 자동화 전문업체 Eclipse는 Beckhoff의 리니어 이송 시스템 XTS에서 해답을 찾았다. 두 번의 현대화 작업 이후, 조립 라인은 이전과 달라진 것 없는 면적에서 두 종류의 펌프를 생산할 수 있게 되었다.
뛰어난 유연성을 갖춘 XTS를 자재 핸들링에 활용함으로써, Eclipse는 자동차 산업의 고객을 위해 콤팩트한 조립 시스템을 구현할 수 있었다. © Eclipse Automation
지난 2001년 설립된 온타리오주 Cambridge 지역의 Eclipse Automation는 자동화 사업을 시작한 이래 폭발적인 성장을 거듭해 왔다. Eclipse 대표이사, Jeff Werner는 다음과 같이 말했다. “Eclipse는 자동차 및 이송 분야뿐만 아니라 생명 과학, 소비재, 원자력 에너지 분야에 이르기까지 다양한 산업에서 사업을 진행하고 있습니다” Eclipse는 지속적인 첨단기술 연구 개발을 통해 단순히 사업에서의 성공뿐만 아니라 고객들이 혁신적인 기술력으로 업계를 선도할 수 있도록 지원하고 있다. Werner 대표는 다음과 같이 말한다. “Eclipse는 다양한 종류의 신기술을 테스트하고 있습니다. 인공지능은 물론 원격 교육 훈련을 비롯해, 유지보수 시스템용 가상 현실 도입에 대한 테스트를 진행하고 있으며, 정밀성과 유연성 실현을 위해 다양한 구성요소에 대한 테스트도 병행하고 있습니다. Eclipse에게 있어 특히 중요한 의미를 지니는 기술이 바로, 리니어이송시스템 입니다”
최근 Eclipse는 Beckhoff의 XTS(eXtended Transport System)를 사용하고 있는 고객사 차량용 이송 펌프 조립 시스템을 업그레이드하는 데 성공했다. 해당 고객은 최초 시스템 도입 당시 기존의 레거시 설비 일부를 대체해 줄 것을 요구했었다. Eclipse의 소프트웨어 설계 감독자, Matthew Kelly는 처리량 및 품질에 있어 방대한 양의 제품을 생산해야 한다는 업체의 요구는 기존 설비로 충족시킬 수 없었다고 설명하며, 다음과 같이 말한다. “기존의 설비는 로터리 다이얼 테이블(rotary dial table)과 유사한 구성요소를 사용하고 있었습니다. 각 작업대에서는 한 번에 하나의 작업만 처리가 가능했으며, 작업대가 하나라도 멈추는 날에는 전체 라인이 작동을 멈출 수밖에 없었습니다”
Eclipse가 요구하는 사용자 맞춤형 솔루션은 기능적 처리 용량을 확장하는 동시에, 설비의 설치 공간을 또한 최소화할 필요가 있었다. Jeff Werner는 다음과 같이 말한다. “공장에서의 설치 공간은 가장 귀한 자원입니다. 고객의 조립 및 프로세스 설비는 상당한 수준까지 통합이 이루어지고 있습니다. Eclipse가 해당 시스템을 제안했을 당시, 고객은 ‘개념은 훌륭하나, 설치 면적을 25% 줄이고 싶습니다’라고 요구했었습니다. 당시에는 그것이 가능할 지에 대한 확신이 없었습니다” 이러한 문제를 해결하기 위해 Eclipse는 Beckhoff 캐나다의 현지 지역 영업 관리자, Dean Herron과 어플리케이션 전문가, Andy Burleigh와 긴밀하게 협업했다.

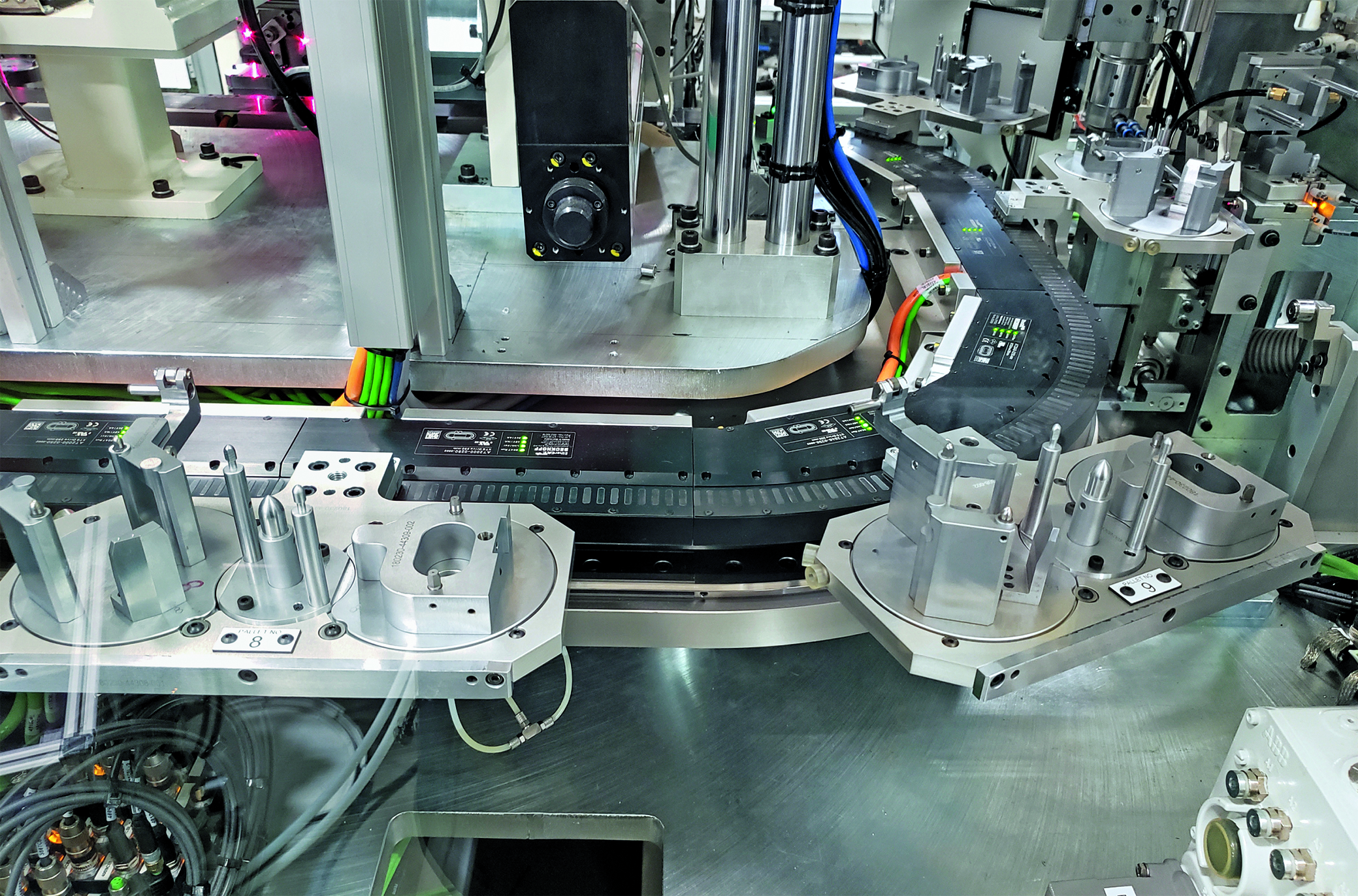
3개의 XTS 시스템을 통해 조립 라인 상에 유연한 자재 흐름을 구현한다. 이들 시스템의 규모는 길이 6미터, 무버 12개부터 길이 12미터, 무버 18개 수준까지 매우 다양하다. © Eclipse Automation
현장에서 검증된 우수한 초기 설비 설계력
XTS 기반 조립 라인은 50개 이상의 작업대를 거치는 4개의 개별 셀로 구성된다. 프레스, 납땜, 나사 조립, LVDT를 활용한 평탄도 점검, 디스펜싱, 플라스마 처리, 누출 테스트, 검사 등의 작업을 진행한다. 이러한 수많은 작업대는 로보틱스 설비와의 정밀한 동기화가 필요하다. 먼저 최초 3개의 설비 셀에서는 작업자가 펌프를 XTS 이송 장치에 부착된 팔레트에 위치시킨다. XTS 시스템의 1번 셀은 길이 12미터 및 무버 18개, 2번 셀은 길이 6미터 및 무버 12개, 3번 셀은 길이 10미터 및 무버 18개로 구성된다. 팔레트의 경사도는 정밀하게 계산되어 미크론 단위의 정밀한 위치 조정도 가능하다. 모든 조립 프로세스가 완료되고 나면, 작업자는 펌프를 다음 셀로 옮기게 된다. 3번 셀에서는 소형 컨베이어를 통해 펌프를 4번 셀로 이송하며, 여기서 로봇이 완성된 펌프를 2개의 GigE 카메라 앞으로 들어 올려 최종 비전 검사를 실시한다. 이어서 컨베이어 위에 올려 출구로 이송하게 된다.
Matthew Kelly는 다음과 같이 설명한다. “XTS는 작업대와 작업대 사이에서 제품을 빠른 속도로 정확하게 이송합니다. 또한 프로세스에서 어느 부품에 문제가 발생하는 경우, 다른 작업대를 우회하도록 하여 빠른 속도로 제거가 가능합니다. 복수의 프로세스를 하나의 작업대로 통합하여 설치 면적을 더욱 줄일 수 있었습니다. 매우 많은 프로세스와 기계 프로세스 작업을 필요로 하기 때문에, 현존 가장 높은 집약도의 자동화 시스템이 탄생하게 된 것입니다”
새로운 요구사항 확립을 통해 생산량 대폭 향상
최초 Eclipse 조립 설비는 기대치를 훨씬 뛰어 넘어 지금까지도 여전히 사용되고 있다. 그러나 2019년 12월, 해당 업체에서 두 번째 설비에 대한 요청이 들어왔다. 그리고 이번에는 까다로운 요구사항이 추가되었다. 같은 시스템으로 또 다른 하나의 펌프를 만들고 싶다는 내용이었다. 새롭게 제작되는 펌프는 기존의 펌프와는 크기가 다르고, 이를 사용하는 자동차 제조사 역시 다른 업체였다. 이로 인해 기존에 설계된 팔레트로는 문제를 해결하는 데에 문제가 있었다. 뿐만 아니라 두 펌프의 조립 순서가 다르다는 문제점도 있었다. 높은 처리량을 계속 유지하기 위해 시스템 상에서 하나의 펌프 모델이 모두 방출될 때까지 기다릴 수 없었다. 펌프를 내보내고 난 후 설비를 재조정하는 것도 불가능했다.
Eclipse는 현지 Beckhoff 팀과 협력하여 EtherCAT의 빠른 사이클 처리 속도와 XTS의 유연성을 합친 새로운 콘셉트의 설비를 고안하게 되었다. Jeff Werner는 다음과 같이 설명한다. “작업자는 시스템을 통해 빠르게 제품을 방출하고 다른 모델의 제품을 탑재한 팔레트로 대체할 수 있습니다. 이러한 새로운 팔레트는 전방으로 인덱싱되며, 구체적인 위치를 측정해 오프셋을 확정합니다. 이러한 오프셋을 각각의 팔레트에 적용하여 구성요소들과 부품들이 프로세스에서 필요로 하는 위치에 정확하게 정렬되도록 합니다. 그러므로 작업자는 A형 모델의 부품을 쉽게 적재하고 한 사이클을 기다린 후 B형 부품을 거의 연속으로 적재할 수 있습니다.”
뿐만 아니라 각각의 무버가 개별적인 구동 축을 구성하므로, 기존의 설계와 같이 서로 연결되어 있지 않다. 대신 필요에 따라 트랙 상에서 자유롭게 작업 대상 부품을 원하는 프로세스로 이동시킬 수 있다. 따라서 두 펌프 간의 프로세스 순서가 다르더라도 영향을 받지 않는다.
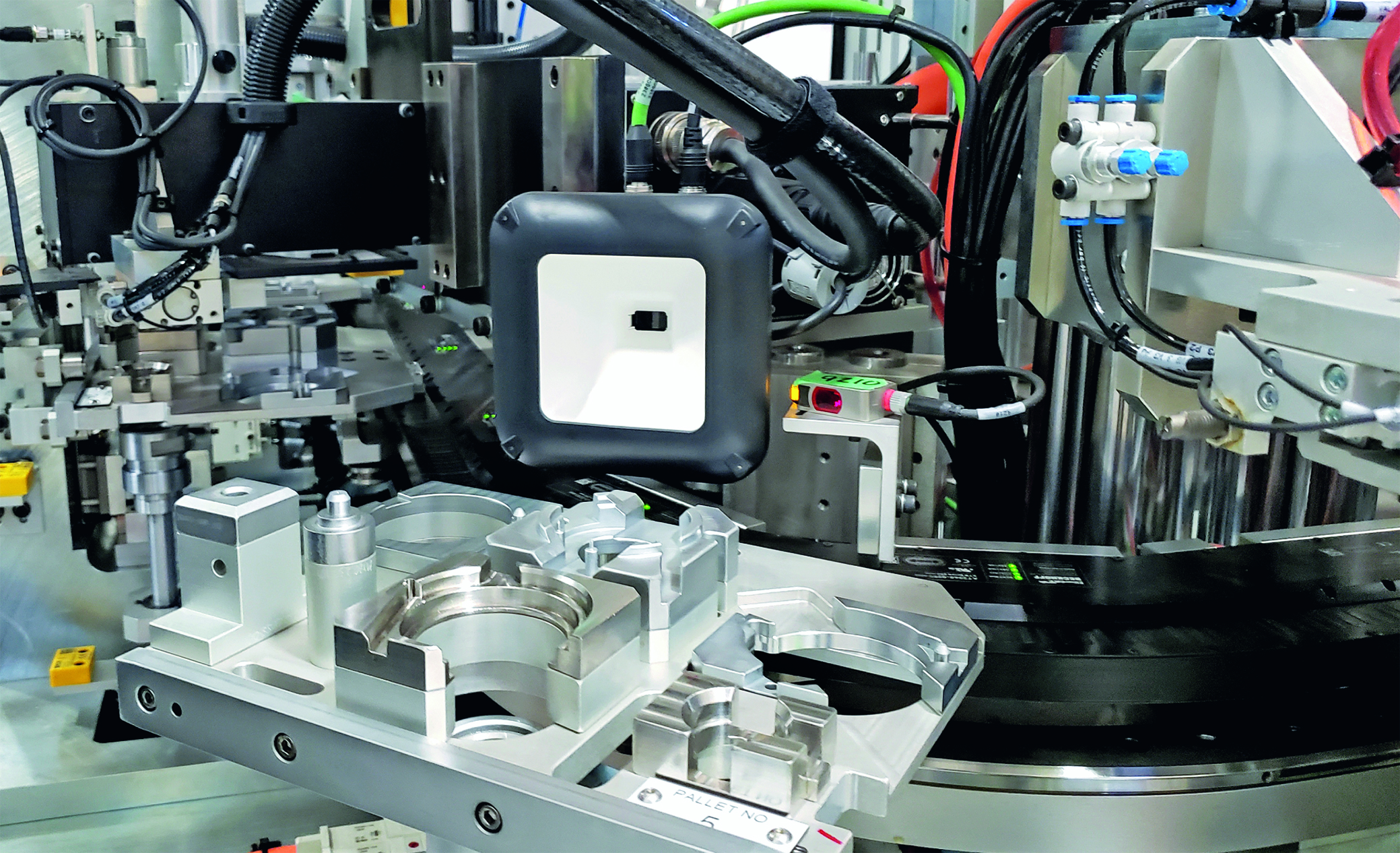
시스템이 사용하고 있는 팔레트 형 작업물 캐리어는 XTS 무버에 부착되어 있으며, 시스템 내의 모든 부품이 방출되도록 기다릴 필요 없이 중간에 다른 종류의 부품으로 변경하여 조립하는 것이 가능하다. © Eclipse Automation
Beckhoff가 제공하는 완전한 자동화 솔루션
3종의 XTS 시스템뿐만 아니라, 해당 조립라인에서는 Beckhoff가 제공하는 다른 EtherCAT 및 PC 기반의 자동화 기술도 활용하고 있다. 처음 1, 2, 3 번 셀은 각각 컨트롤 캐비닛 산업용 PC, C6930(IPC)을 장비하여 해당 셀의 XTS 트랙 및 주변 디바이스를 제어한다. TwinSAFE는 전체 라인에 걸쳐 기능적 안전을 구현한다. 또한 IPC는 EtherNet/IP 프로토콜을 통해 라인의 다른 부분을 제어하는 2차 설비 컨트롤러와 통신을 주고받는다. 그러나 시스템의 주 통신 및 I/O를 제공하는 것은 EtherCAT이다. Beckhoff의 Dean Herron는 다음과 같이 설명한다. “로보틱스, 서보 구성요소들과 실시간으로 EtherCAT 동기화를 구현함으로써 엔지니어는 다양한 디스펜싱 프로세스를 번갈아 작동시킬 수 있게 되었습니다. 특히, 특정한 패턴으로 접착제를 도포하는 등의 작업이 가능해졌습니다”
이러한 고급 기능을 구현하기 위해서는 자동화 소프트웨어 TwinCAT 3의 역할이 매우 중요합니다. Beckhoff의 범용 엔지니어링 및 런타임 플랫폼인 TwinCAT 3를 통해 Eclipse 소속 엔지니어들은 G 코드를 프로그래밍하여 XTS 및 서보 모터 AM8000이 고정밀 디스펜싱 작업을 진행하도록 동작을 조율하는 데 성공했다. 뿐만 아니라 Eclipse는 마이크로소프트 Visual Studio를 활용하여, IEC 61131-3의 객체지향 프로그래밍 확장 기능, 사전 지정, 사용자 맞춤형 펑션블록, 컴퓨터 공학 표준을 활용한 프로그래밍 작업을 수행하는 이점을 얻을 수 있었다. Matthew Kelly는 다음과 같이 설명한다. “팔레트 제어, 팔레트 오프셋 테이블, 기타 유사한 요구사항에 대한 프로그래밍을 진행하는 과정에서 Beckhoff는 타사 제품 대비 상당히 많은 이점을 제공하고 있습니다. 이 덕분에 엔지니어링 작업 시간을 크게 단축할 수 있었습니다”
빠른 생산 전환으로 즉각적인 결과 도출
Eclipse가 구현한 혁신적인 설계와 최신의 변속기 펌프 조립 시스템은 부품 당 20.2초라는 명시된 사이클 타임 요구 조건을 충족할 수 있었으며, 그와 동시에 고객이 요구했던 미크론 단위의 정확도 조건도 달성할 수 있었다. 2021년 초에 시운전을 마친 이후로, 해당 시스템은 각각 분리된 배치에 A형, B형 부품을 운영하면서 대략 시프트 당 1,000개의 부품을 생산할 수 있었다. 팔레트를 손쉽게 탈착할 수 있는 설계, XTS에 대한 즉각적인 자동 인덱싱 기능으로 전환 작업을 매우 빠르게 처리할 수 있게 되었다. 기존에는 1시간 이상이 소요되던 전환 작업을 이제 단 1분 만에 수행할 수 있게 되었다. Werner는 다음과 같이 설명한다. “매우 콤팩트하고 복잡한 프로세스 상에서도 이렇게 빠른 시간 안에 생산 전환이 가능한 것을 확인한 고객은 벌어진 입을 다물지 못할 정도였습니다” 제어 및 기계 엔지니어링으로, 하나의 나사도 풀지 않고도 이러한 팔레트를 손쉽게 분리할 수 있게 된 것이다. 팔레트는 간단하게 저장용 버퍼로 이동시킬 수 있으며, 손상이 발생하는 경우 작업자는 교체도 간단하게 수행할 수 있다.
업체 전문가들에 따르면 Eclipse는 꾸준한 혁신을 이어오고 있다고 얘기한다. Eclipse는 이 외에도 코로나19 간이 신속 진단키트 어플리케이션에 XTS 및 PC 기반 제어를 활용하는 등, 전례 없이 수많은 고속의 마이크로 조립 어플리케이션도 훌륭하게 수행한 바 있다. Werner는 이것이 고객에게 고효율 저비용의 솔루션을 제공하는 것뿐만 아니라, 재능 있는 새로운 엔지니어링 인재들이 Eclipse에서 근무하고 싶도록 만드는 데에 있어서도 중요한 의미를 갖는다고 생각한다.
Werner는 다음과 같이 설명한다. “오늘날 대부분의 학생들은 기존의 PLC 프로그래밍을 배우지 않습니다. 대신 이러한 졸업생들은 PC 기반 제어 시스템에 대해 과거 어느 때보다도 훨씬 더 깊은 이해도를 지니고 있으며, 이러한 이해도는 매년 향상되고 있습니다. Beckhoff는 모든 자동화 기술 뿐만 아니라 이러한 분야에서도 신뢰할 수 있는 파트너로 검증된 업체입니다.”
연락처:
Beckhoff Automation Co., Ltd.
www.beckhoff.com/kr
info-kr@beckhoff.com