









HS Kempten에서 개발된 테스트 벤치와 ABT에 의해 전기 구동 방식으로 전환된 VW 밴. © Beckhoff
다양한 종류의 차량을 만드는 소형 시리즈 생산자 및 제조사의 경우 빠르고 유연하고 비용 효율적인 종합 테스트벤치를 이용하는 것이 매우 중요하다. Kempten University of Applied Sciences(HS Kempten)는 ABT e-Line GmbH를 위해 전기 구동 방식으로 전환된 폭스바겐(VW) 밴의 테스트 작업을 수행할 수 있는 테스트 벤치를 개발하여 구현하는데 성공했다. Beckhoff의 PC 기반 제어 기술은 이 프로젝트에 사용된 표준 산업 구성품에서 핵심적인 기능을 수행한다.
HS Kempten에서 테스트 벤치는 주로 차량 기능을 시험하는 데 사용된다. 테스트 벤치는 자동차 및 자동화 부문을 위한 응용 연구 및 개발 주제를 연구하고 개발하는 HS Kempten의 제어공학차량시스템연구소(Control Engineering and Vehicle Systems)에서 개발되었다. 이 연구소는 당초 구성품 테스트 목적으로 2016년에 설립되었다. 연구소는 그후 활동을 확대하여 복잡한 전체 시스템을 위한 테스트 벤치를 포함하였으며 연구 이외에 교육까지 수행하고 있다.
테스트 벤치의 목적은 신형 차량과 새 기능을 최대한 신속하게 테스트하고 개별 기능이 서로 어떤 영향을 미치는지 검사하는 것이다. 또 다른 이점은 대부분의 전통적인 테스트 벤치처럼 운전 조건을 수정하는 대신 본래의 도로 조건에서 차량을 테스트할 수 있다는 것이다.
HS Kempten의 Allgäu 연구 센터에서 보조 연구원으로 근무하고 있는 Florian Zerbes는 테스트의 범위 및 프로세스를 다음과 같이 설명한다. “전기차의 경우 테스트의 목적은 고전압 배터리로부터 필요한 전력을 얻는 HVAC 시스템이 시동 켜기, 운전 및 시동 끄기와 같은 차량의 가장 중요한 기능에 제대로 작용하는지 여부를 시험하는 것입니다. 여기에는 차량을 반복적으로 시동하고 정지하고 가속하는 테스트 사이클을 정하는 일이 수반됩니다. 따라서 테스트 동안 차량의 상태가 변합니다. 즉, HVAC 시스템이 켜지고 꺼지며 배터리 충전 레벨이 변동합니다. HS Kempten의 테스트 벤치에서는 이러한 테스트가 수 시간 또는 심지어 며칠에 걸쳐 완전히 독립적으로 실행됩니다. 테스트 과정에서 테스트 벤치 및 차량에서 전송되는 데이터가 추후 분석 및 최종 테스트 결과로 통합될 수 있도록 연속적으로 기록됩니다”
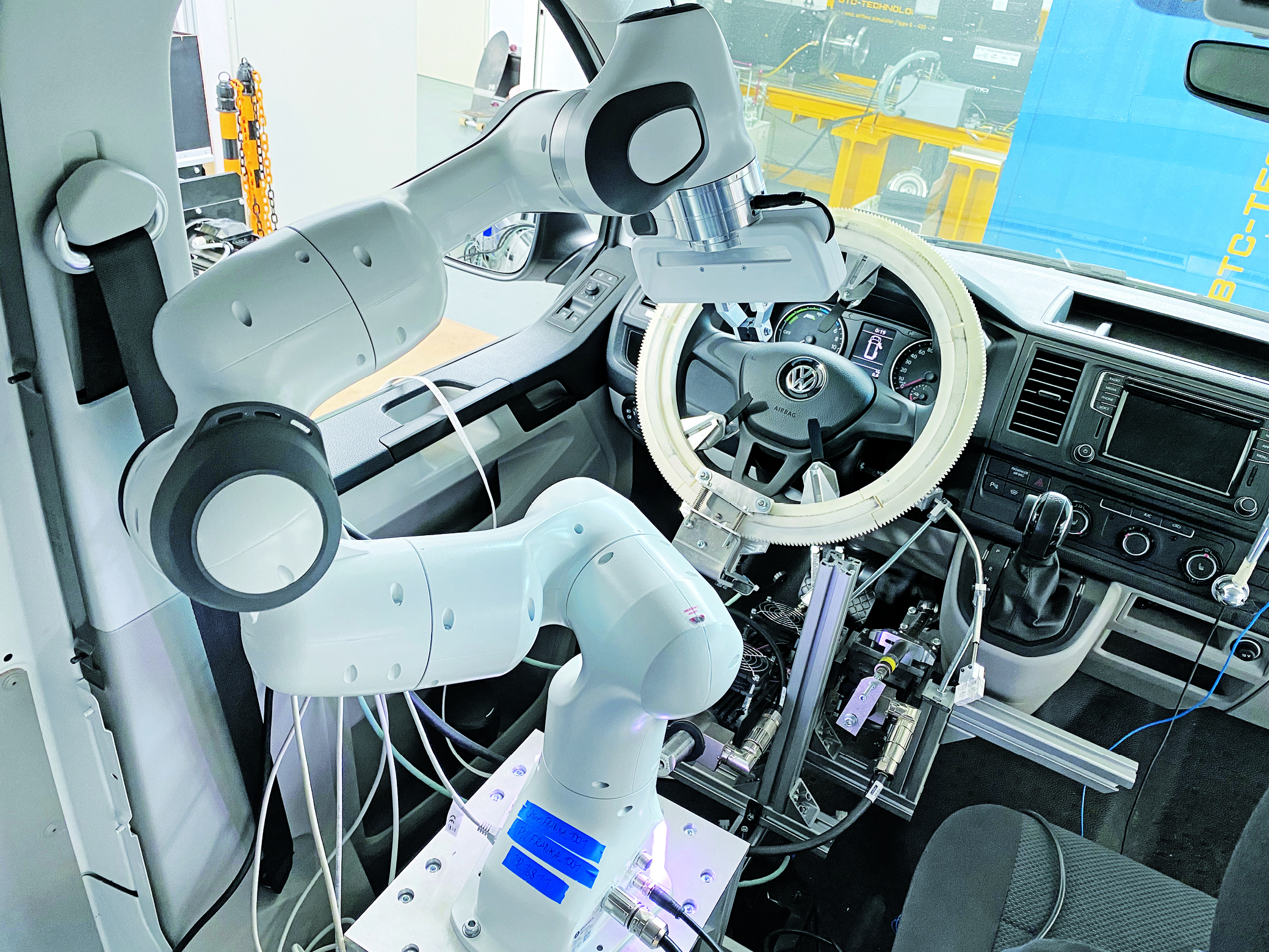
차량 조작을 위한 로봇 및 선형 모터로 완성된 내부. © Beckhoff
테스트 벤치의 구조
차량 바퀴에 플랜지로 연결된 출력 모터가 바퀴의 추진에 저항력을 제공하는데, 이는 도로상에서의 주행을 시뮬레이션하기 위한 것이다. 차량 내부의 로봇이 시동 키를 켜고, 기어 변속기를 움직이고, 실내 에어컨 버튼과 같은 다양한 버튼을 조작한다. 페달에 있는 선형 모터는 가속 페달 및 브레이크 페달을 누르는 역할을 하며, 조향 모터는 스티어링 휠을 돌린다. 차량 외부에 있는 두 번째 로봇은 다양한 충전 케이블을 충전 소켓에 연결하고 분리한다.
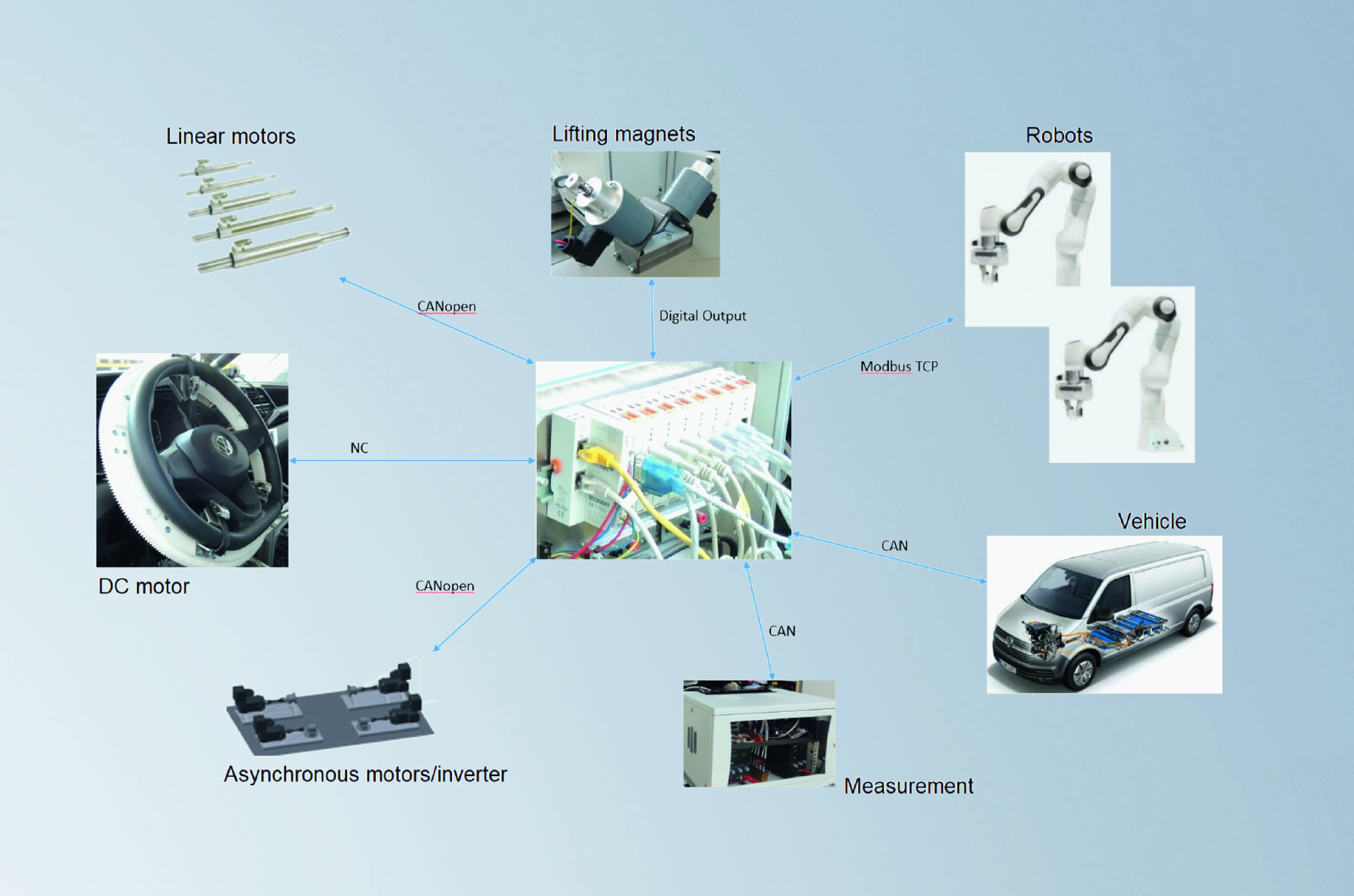
후속 분석을 위해, 측정 기술을 사용하여 차량의 배선 하네스에서 전류 및 전압을 파악한다. C6030 초소형 산업용 PC와 TwinCAT으로 구성된 Beckhoff 제어 플랫폼이 CAN 버스를 통해 개별 구성품 및 차량과 통신한다. 이 중앙 제어 장치는 개별 구성품들을 조율하고 적절히 제어하는 역할을 한다. 각기 다른 절차로 다양한 테스트를 수행할 수 있다. 모든 CAN 및 CANopen 디바이스를 통합하는 9개의 EL6751 EtherCAT 터미널과 1개 채널 통신 인터페이스를 통해 EtherCAT 제어 시스템의 CAN 디바이스들 간의 원활한 통합을 보장한다.
테스트 과정에서 차량은 실제 도로와 같은 운전 조건에서 테스트를 진행한다. 이를 위해 드라이브 테스트 벤치가 시뮬레이션된 토크에 따라 바퀴를 움직이며 조향 동작까지도 수용할 수 있다. 시뮬레이션이 실제 상황과 너무 흡사하기 때문에 차량은 테스트 벤치에 있다는 사실조차 ‘인식’하지 못한다. 심지어 운전자의 조작도 상응하는 액추에이터에 의해 시뮬레이션 된다. 산업용 로봇이 대부분의 조작을 수행하기 때문에 최대한 많은 다양한 조작을 원활히 진행시킬 수 있다. 통신 방식(예: GPS를 통한 통신)을 포함한 차량과 주변 환경과의 상호 작용도 역시 시뮬레이션 된다. HS Kempten은 실제 같은 테스트 벤치 환경 뿐만 아니라 시스템의 디지털 트윈까지 개발했다. 이를 통해 테스트 벤치의 사전 시운전을 원활하게 수행할 수 있을 뿐만 아니라 시스템을 종합적이고 시각적으로 파악하고 모니터링할 수 있다.

Beckhoff 시스템(C6030초소형IPC, 7개의 EL6751, 1개의 EL6614 EtherCAT터미널)을 통해 테스트 벤치의 중앙 제어 플랫폼 형성 및 모든 구성품과의 직접 통신 구현. © Beckhoff
산업용 기술을 통한 비용 절감 및 유연성 향상
새 테스트 벤치를 개발할 때 주요 고려사항은 최대한 비용 효율적인 시스템을 구현하는 것이었다. 특히 컨버터, 모터 및 컨트롤과 같은 표준 산업용 구성품을 사용함으로써 목표를 달성할 수 있었다. 또 다른 고려사항은 차량 모델과 관계없이 시스템을 차량에서 신속하게 탈거하고 장착할 수 있도록 하는 것이었다. 따라서 테스트 벤치를 쉽게 수정할 수 있어야 했다.
HS Kempten에서 기계공학과 교수로 재직하고 있는 Andreas Stiegelmeyr 박사는 시스템의 요건 및 구현 과정을 다음과 같이 설명한다. “HS Kempten은 표준 차량 인터페이스를 사용하여 대부분의 차량 기능을 테스트할 수 있는 테스트 벤치를 개발했습니다. 새로 개발된 테스트 벤치는 차량 모델과 관계없이 최소한의 작업으로도 매우 정밀하게 연결하여 기능을 테스트할 수 있습니다. 그렇기 때문에 HS Kempten이 개발한 테스트 벤치는 다양한 차종, 특히 소형 차량을 생산하는 차량 제조사 입장에서 훌륭한 대안인 셈입니다”
Florian Zerbes는 다음과 같이 부연 설명한다. “HS Kempten이 산업용 구성품에 대한 다양한 인터페이스를 제공하고 있다는 점을 고려하여 Beckhoff의 제품을 중앙 제어 시스템으로 선택했습니다. 게다가, Beckhoff의 제어 기술은 EtherCAT 터미널 추가를 통해 쉽게 확장이 가능하고 EtherCAT의 유연한 토폴로지 구성 덕분에 최적의 공간 배치가 가능합니다. 가용한 하드웨어 및 소프트웨어 제품이 많기 때문에 최소한의 작업으로도 다양한 측정 및 제어 작업을 완수할 수 있습니다. 무엇보다, Beckhoff의 PC 기반 제어 기술은 자동차 부문의 다른 시스템에 비해 비용 효과 관점에서 탁월한 이점을 제공합니다.”

HS Kempten에 있는 테스트 벤치에 장착된 Beckhoff 제어 시스템 인터페이스의 개요도. © HS Kempten
툴체인을 통한 테스트 시퀀스 결정
테스트 시퀀스는 특별히 개발된 툴체인을 사용하여 ST 언어로 작성되고 MATLAB/Simulink로 생성된다. 이를 통해 TwinCAT과 Simulink를 함께 효과적으로 사용할 수 있다. Florian Zerbes는 이를 다음과 같이 상세하게 설명한다. “Simulink에서 하드웨어 링크에 대한 정보가 이미 담긴 블록을 자동으로 생성할 수 있습니다. 해당 모델을 컴파일링할 때 TwinCAT 자동 인터페이스에 의해 상응하는 하드웨어 링크가 자동으로 설정되고 모델과 하드웨어 간에 링크 레이어가 생성됩니다” 새 툴체인은 다음과 같은 이점을 제공한다.
•필수 Simulink 모델을 아무런 작업 없이도 생성할 수 있다.
•다양한 데이터베이스를 어떠한 문제도 없이 사용할 수 있다.
•하드웨어와의 연결을 자동으로 구현하고 Simulink® 모델에서 직접 구성할 수 있다.
•믿기 힘들 정도로 직관적인 인터페이스를 제공하여 사용자는 이점을 얻을 수 있다.
현재는 툴체인의 CAN 버스에 노력을 집중하고 있다. 구체적으로 설명하자면 예를 들어 DBC 파일을 통해 CAN 메시지 블록을 매우 빠르게 생성할 수 있다. 그런 다음 이와 같은 블록을 모델의 나머지 부분에 직접 연결하고 Simulink에서 하드웨어 연결을 구성할 수 있다. 사용자는 Simulink®에서 GUI를 통해 개별 메시지를 구성하고 하드웨어에 대한 기타 연결을 구성할 수 있다. Simulink® 모델이 생성되면 최소한의 작업으로 툴체인을 통해 모델을 TwinCAT에 쉽게 연결할 수 있다. 사용자는 단지 어느 Simulink® 모델을 어느 TwinCAT 프로젝트와 연결할지 결정하는 것만 하면 된다.
그 외에는 모든 것이 완전히 자동으로 실행된다. 이와 동시에, 예를 들어 하드웨어 또는 PLC 프로젝트의 구현 관점에서 TwinCAT 프로젝트에 대한 조정을 수행하는 것도 또한 가능하다.
테스트 벤치 상의 ABT 밴
HS Kempten에 있는 테스트 벤치에 장착된 Beckhoff 제어 시스템 인터페이스의 개요도. © HS Kempten
“HS Kempten에서 개발한 테스트 벤치 덕분에 변화하는 요구 사항에 신속하게 대응할 수 있게 되었습니다. 지금은 아주 짧은 시간에 새로운 종합적인 테스트 시나리오를 구현하고 완전히 자동화된 방식으로 차량을 테스트할 수 있습니다. 따라서 이 테스트 벤치는 ABT의 민첩한(애자일) 개발 프로세스 전반에 걸쳐 혁신적인 지원을 제공합니다.”
링크:
www.abt-eline.com
www.hs-kempten.de/en/research
www.beckhoff.com/measurement
연락처:
Beckhoff Automation Co., Ltd.
www.beckhoff.com/kr