








ETG(EtherCAT Technology Group) Korea가 7월 1일, 메이필드 호텔에서 2022 Press Meeting과 ETG 멤버미팅을 개최했다.
기자간담회는 장애 vs 안정성: 통신기술을 관리하지 않는 방법, EtherCAT과 OPC: 완벽한 IIoT 아키텍처를 위한 상호 보완이라는 두 가지 주제로, IIoT에서의 EtherCAT과 OPC의 궁극적인 관계에 대해 소개했다.
ETG에서는 기계 제어 단에는 EtherCAT을, 컨트롤러 사이에는 EtherCAT Automation Protocol(EAP)을 적용하고, 상단에는 OPC UA를 적용하는 것이 정답이라고 보고 있다. EtherCAT과 OPC UA를 함께 적용할 때, 더 좋은 IIoT 통신구조를 만들 수 있고, 매칭이 완벽하다는 것이 EtherCAT 측의 주장이다. 특히, EtherCAT과 TSN을 연결하면서도, TSN으로 인해 EtherCAT을 변경하지 않고 활용할 수 있다는 점에서, EtherCAT 기술이 안정적이면서도 미래에도 사용할 수 있는 기술이라는 점을 강조했다.
ETG 멤버 미팅에서는 인캣을 비롯해서, 한국기계연구원, 한국전자기술연구원, ETG에서 각각 발표를 진행했다.
한국기계연구원 로봇 메카트로닉스연구실 서현욱 선임연구원은 로봇을 위한 서보드라이버의 EtherCAT 통신 개발을 주제로 한 발표에서, EtherCAT의 고성능의 동기 통신 기술을 장점으로 설명하는 한편, 비정형 확장성 측면을 단점으로 꼽았다. 또 한국전자기술연구원 지능 로보틱스 연구센터 김정훈 연구원은 260축 모터의 단일 마스터 제어 및 마스터 부하를 주제로 한 발표에서, EtherCAT과 TwinCAT을 사용하게 된 이유는 실시간성이라고 말하고, 단일 마스터로 260축을 구현한 경험과 소프트웨어 구조, 부하량 부분에 대한 기술을 공유했다.
Ⅰ. ETG Press Briefing

ETG Martin Rostan 전무가 EtherCAT과 OPC를 활용한 IIoT 아키텍처에 대해 발표를 하고 있다. (사진 ETG코리아)
EtherCAT Technology Group Executive Director인 Martin Rostan 씨는 ETG 업데이트를 통해 현재 ETG 회원사는 거의 6800개사에 달하며, 2014년 8월 이후 매 12개월마다 400개 회원이 추가되면서, ETG는 세계 최대규모의 필드버스 협회로 위치하고 있을 뿐만 아니라, 지난 10년 동안 필드버스 협회 가운데 가장 빠르게 성장하고 있다고 역설했다. 또, 아시아 회원이 전체 회원의 41%를 차지하면서, ETG는 더 이상 유럽조직이 아닌 글로벌조직이라고 강조했다.
Martin 디렉터에 따르면, 아시아지역에는 약 2800개의 회원사가 있으며, 한국의 회원사는 430개가 넘었다.
EtherCAT 칩 종류도 확대되고 있다. NXP가 EtherCAT 칩에 포함된 가장 최신의 칩으로, 대부분의 대형 반도체 업체들이 EtherCAT 기술을 사용하고 있다.
특히 마스터가 다양한 것이 다른 필드버스와 차별화되는 특징으로, EtehrCAT 마스터 밴더는230개 사에 이른다. 드라이브 밴더는 200여 개 사로, 이러한 밴더들이 제공하고 있는 EtherCAT 드라이브 제품 숫자는 1000개 이상이다. EtherCAT I/O 역시 1000개가 넘는다.
Martin 디렉터는, 따라서 EtherCAT이 필드버스 기술 중에서 시장에서 가장 다양한 제품들과 함께 활용이 되고 있다는 것을 알 수 있다고 강조했다.
1. EtherCAT과 산업용 IoT 아키텍처
Martin 디렉터는 자동화 피라미드는 이제 구시대적인 개념인 것 같다고 말하고, 새로 출시되는 기술들은 피라미드가 아닌 자동화 네트워크가 돼서 여러 스마트 자동화 장치들이 어떻게든 네트워크와 상호연결되어 있다고 설명하고, 많은 경쟁사들이 이와 같은 전략을 채택하면서 센서에서 클라우드까지 하나의 기술을 사용한다고 이야기하고 있다고 말했다.
<그림1> EtherCAT 구조
그러나 Martin 디렉터에 의하면, EtherCAT은 경쟁사들과는 다른 구조를 채택하고 있다.
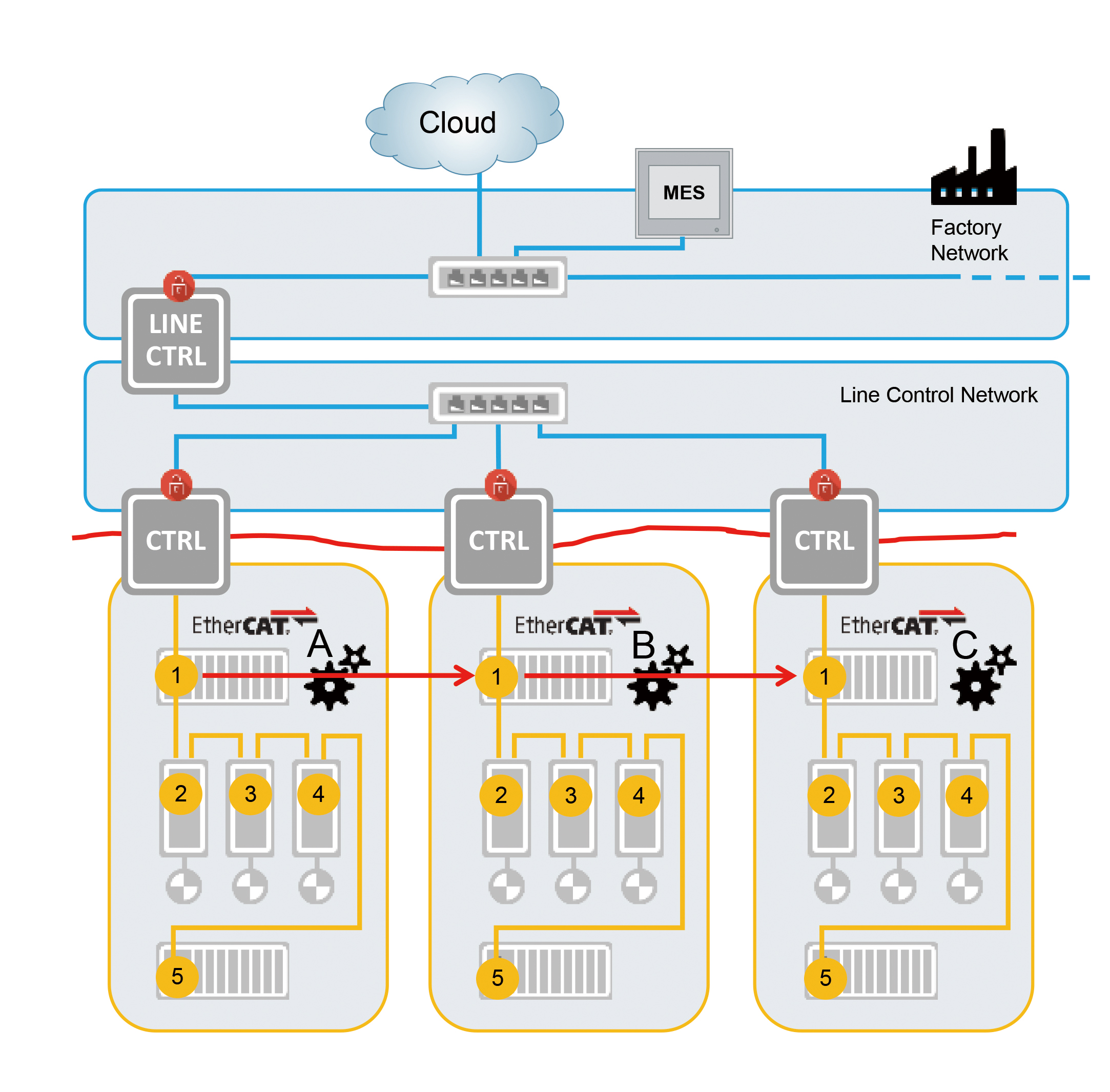
EtherCAT은 필드버스 네트워크와 그 상단에 있는 것을 분리하는 구조를 채택하고 있다. 즉, 컨트롤러를 중심으로 아랫단과 윗단이 분리되어 있다. 이렇게 되면 필드버스 기술이 그 상단에 있는 것과 독립적으로 움직일 수 있게 된다. 이와 같이 분리되어 있는 경우에는 기계모듈을 공장에서 프리 컨피규레이션해서 고객사에 제공하는 것이 가능해진다. 고객사에 가서 연결을 할 때 아랫단의 변경이 전혀 필요 없다는 것이 차별점이다.
예를 들어 조립공장에 3대의 로봇이 투입된다고 가정하자. 내부적으로는 각각의 로봇이 같은 주소를 사용하게 된다. 뿐만 아니라, 로봇 네트워크와 그 윗단에 있는 광대역은 완전히 분리되어 있다. 윗단에만 사이버 보안을 적용하면 된다. 아래쪽은 완전히 독립적이고 간접적으로만 연결되어 있기 때문이다.
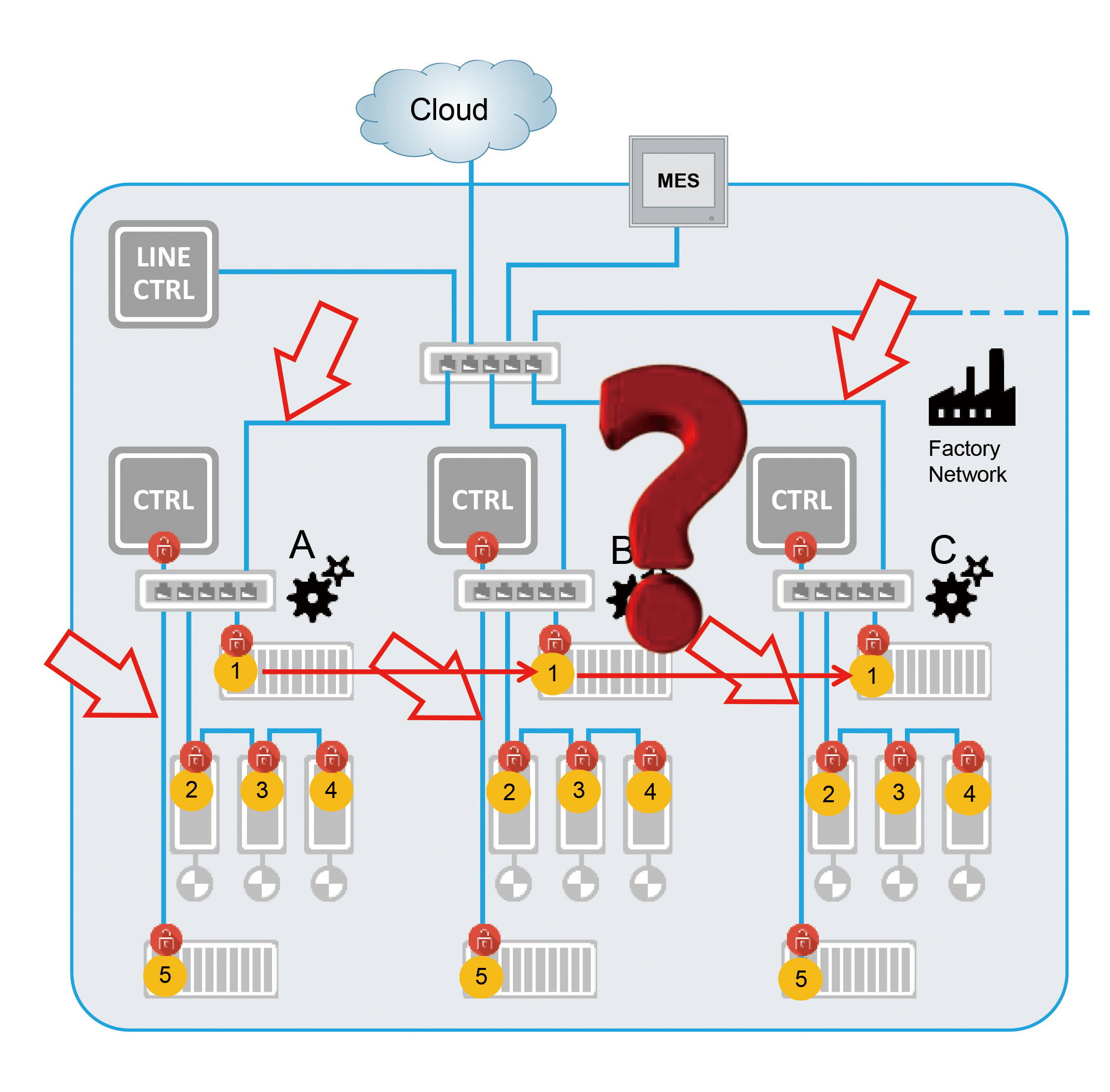
그렇지만 스위치와 모든 것이 하나로 연결되어야 한다는 이론도 있다. TSN을 필드버스 네트워크까지 연결하기 위한 근거로 이와 같은 형태의 네트워크를 활용하고 있다. 그러나 이렇게 되면 매번 모든 세팅을 그 상단에 있는 것과 맞추는 작업을 해야 한다. 같은 주소를 사용할 수 없고 주소를 변경해야 한다. 따라서 만약 5대의 로봇을 고객사에 제공하게 된다면, 컨피규레이션도 5번을 해야 한다. 뿐만 아니라 로봇은 상단과 연결이 되어 있기 때문에, 상단에서 제공하는 광대역에 의존한다.
그리고 각 노드마다 사이버 보안을 적용해야 한다. 그리고 이상이 생겼을 때, 그 이상에 대해누가 책임을 지는지도 불명확해진다. 예를 들어서 어떤 기계를 A사로부터 구입해서 적용을 했는데, 차후에 다른 밴더로부터 다른 기계를 구입해서 적용을 했을 때, IP주소의 중복이 일어나고, 뭔가 잘못됐을 때 책임소재가 불분명해진다.
자동화 아키텍처는 더 이상 계층구조가 없다.
따라서 ETG는 이와 같은 접근이 이론적으로는 가능할 수 있지만, 현실적으로는 어렵다고 보고 있다.
2. IoT 통신기술
IoT 아키텍처를 위해서는 짧고 확정적인 주기시간이 필요하고, 아래쪽에 신뢰 가능한 통신도 있어야 한다. 그리고 라인 컨트롤단에는 데이터 보안이 이루어질 수 있어야 한다.
밑단에 보면 SCADA도 그렇고 클라우드 기반의 기술도 마찬가지로 연결성이 필요하다. 그리고 명확한 구조화도 필요하다. 이를 통해서 이 네트워크가 하나의 디바이스로 보급화 될 수 있어야 한다.
기계 제어 단에는 EtherCAT을, 컨트롤러 사이에는 EtherCAT Automation Protocol(EAP)을 적용하고, 상단에는 OPC UA를 적용하는 것이 정답이라고 보고 있다. 따라서 ETG에서는 EtherCAT과 OPC UA를 함께 적용할 때, 더 좋은 IoT 통신구조를 만들 수 있고, 매칭이 완벽하다고 보고 있다.

IoT Communication Technologies
3. 어떻게 통신기술을 관리하지 않아야 하나?
TSN 네트워크로 가게 되면 디바이스 당 인증서가 최소한 3개는 필요해지고, 이렇게 되면 인증 관리 시스템도 3개가 필요해진다. 프로피넷, TSN, OPC 각각 인증이 필요한데, 이렇게 되면 서보 드라이브 하나 사용하기 위해 유저는 3개의 인증을 관리해야 한다. IO노드의 경우에는 2건의 인증이 필요하게 된다. 이런 인증은 각각 유효기간을 갖고 있다. 그렇기 때문에 디바이스당 10개의 인증을 유지관리해야 한다는 것을 의미한다. 이렇게 되면 EtherCAT만 이득이 될 것이라는 것이 Martin 디렉터의 이론이다.
이어서 EtherCAT이 경쟁 프로토콜과 달리 어떻게 기술을 관리하는지 설명했다.

EtherCAT 및 TSN: EtherCAT 장치에는 변경 사항이 없다.
기본적으로 사용하고 있는 구조로서 슬레이브를 바로 컨트롤러에 연결하게 된다, 또 요즘 TSN이 워낙 회자가 되고 있기 때문에, 이에 대한 답도 제시를 하고 있다.
TSN을 적용하게 되면 EtherCAT Automation Protocol을 실시간으로 활용할 수 있기 때문에, 또 장점이 생긴다. 또한 TSN을 이용하면 원격으로 연결되어 있는 EtherCAT 세그먼트를 관리하게 된다. TSN 도메인은 멀리에 있는 여러 세그먼트들을 원격으로 마스터가 관리할 수 있다는 것도 의미한다. EtherCAT의 뛰어난 장점은 아랫단에 있는 디바이스들은 TSN과 전혀 상관없이 사용할 수 있다는 것이다. 즉, EtherCAT과 TSN을 연결하면서도 TSN 때문에 EtherCAT을 변경하지 않고 활용할 수 있다. 그렇기 때문에 EtherCAT 기술이 안정적이면서도 미래에도 사용할 수 있는 기술이 되는 것이다.
이러한 예로 EtherCAT G가 소개됐다.
현재 ETG에서는 EtherCAT을 기가비트 그 이상으로 확대하고 있다. 브랜치 세그먼트 100메가바이트를 기가비트와 연결함으로써, 이렇게 되면 네트워크를 연결해서 사용할 수 있다는 장점이 있을 뿐만 아니라, <그림6>의 노란색으로 표시되어있는 부분의 성능도 같이 올라가게 된다.

EtherCAT G 분기 개념:EtherCAT 장치에 대한 변경이 사항 없다.

EtherCAT G 분기 컨트롤러: 100Mbit/s 장치로 5배 더 빠르다.
이렇게 적용을 하게 되면 과거보다 5배가 빨라지고, 오늘날 사용하는 디바이스를 그대로 사용해도 이와 같은 결과를 얻을 수 있다. EtherCAT 디바이스 자체에는 아무런 변경이 없이도 가능하다. 원한다면 기가비트를 디바이스단에도 적용할 수 있다. 그렇게 되면 성능은 더 올라가게 된다.
그렇지만 대부분은 <그림6>의 가운데를 선호한다. 8핀 커넥터 대신에 4핀 커넥터를 사용할 수 있기 때문이다. 이렇게 되면 케이블도 더 저렴하게 사용할 수 있고, 견고한 솔루션을 사용하면서도 업계 최대의 다양성을 추구할 수 있기 때문이다. 기가비트는 필요에 따라 선택해서 추가할 수도 있다. 그러나 필드단에서는 가운데가 가장 많이 사용되는 솔루션이 될 것으로 본다.
한편, EtherCAT은 기술은 계속 발전시키지만 버전을 바꾸지는 않는다. 단 하나의 버전만 가지고 있고, 매년 새로운 버전이 나오는 것이 아니다. 따라서, 오늘 새로운 디바이스를 2004년에 확립해놓은 네트워크에 적용하더라도 문제없이 사용할 수 있다. 결국은 기술의 지속성과 안정성이 중요한데, EtherCAT이 바로 이런 것들을 확보하고 있다. 미래에도 사용 가능할 수 있도록 계속해서 새로운 기술을 추가하고 있다.
<Q&A with ETG>
“드라이브 프로파일을 반도체 산업 외에 적용할지 논의 중”
Martin Rostan/ EtherCAT Technology Group Executive Director
Q. ETG는 기본적으로 TSN에 반대하는 입장인가? 시스템의 상단으로 갈 때 OPC UA가 정답이라고 얘기했다. OPC UA와 기존 프로토콜을 같이 쓸 때 어떤 이익이 있나?
A. 우리는 TSN에 반대하는 것은 아니다. 우리 팀원 중의 한 명이 2004년부터 TSN 위원회에 참여하고 있다. 하지만 TSN은 아직 갈 길이 멀다고 생각한다. 그리고 TSN은 컨트롤러를 중심으로 상단에만 적용되어야 하지, 하단에는 적용이 되면 안 된다고 보고 있다. 그리고 기존에 있는 기술에 TSN을 적용해서 혼란과 파괴를 일으키는 건 얻을 게 없다고 생각한다.
따라서 우리의 입장은 ‘필요에 따라서 TSN을 통해 기술을 조금 더 발전시킬 수 있다’는 정도다. 그래서 TSN 네트워크와 연결은 가능하지만, TSN을 우리 기술에 임베디드하지는 않는다.
상단에 OPC UA를 적용했을 때의 이점에 대해 설명하면, 우리는 8년 전에 OPC 재단과 MOU를 체결했다. 이 MOU에서 우리의 기술은 클라우드나 그 윗단의 통신까지 발전시키 않겠다고 합의한 바 있다. OPC의 장점은 어떤 특정 필드버스에 종속되어 있지 않기 때문에 EtherCAT과도 같이 쓸 수 있지만, 지멘스나 미쓰비시, 어떤 브랜드의 필드버스도 사용할 수 있다는 것이다. 그래서 컨트롤러보다 상단에 있는 부분에 대해서 OPC가 중립적이다. OPC는 보안도 같이 제공하고 있다. 컨트롤러가 여러 종류가 있더라도 컨트롤러 간 통신을 OPC에서 표준화하고 있다. 그렇기 때문에 결국은 우리가 집중할 수 없는 이슈들에 대해 OPC가 업무를 진행하고 있다는 장점이 있다.
Q. EtherCAT 발전 방향에 대한 설명을 부탁한다.
A. 브리핑에서 두 개의 핵심사례 발표를 통해서 얘기했다.
EtherCAT G가 일단 중요한 트렌드다. 밴드윗이 더 높아지는 방향으로 EtherCAT이 발전하고 있다. 이것은 성능에 문제가 있어서가 아니다. 디바이스 중에 더 높은 광대역이 필요한 경우가 생기기 때문이다. 그렇기 때문에, 이와 같은 어플리케이션도 EtherCAT으로 사용할 수 있도록 EtherCAT G와 EtherCAT G10 방향으로 발전해 나갈 것이다.
두 번째는 TSN과의 연결성이다. 어느날 갑자기 TSN이 표준화가 돼서 실제 공장에 적용이 되기 시작할 경우에, EtherCAT도 준비가 되어있어야 하기 때문이다.
디바이스 프로파일도 계속해서 개선하고 있다. 디바이스 프로파일은 특정 디바이스와 어떤 부분을 통신해야 하는지를 정의한다. EtherCAT이 어떻게 통신하는지 정의한다면, 디바이스 프로파일은 무엇을 즉 컨텐츠 자체를 정의하게 된다. 드라이브 프로파일을 사용하게 되면, 컨트롤러는 드라이브와 연결이 될 때 드라이브가 A사의 제품이든 B사의 제품이든 상관없이 동일하게 움직이게 된다.
지난 10년간 반도체 산업에서 드라이브 프로파일을 적용하면서, EtherCAT이 상당한 발전을 했다. 그리고 이와 같은 노력이 지속되고 있다. 반도체 산업 외에 다른 업계에도 이것을 적용할지 논의하는 중이다.
한 가지 사례를 얘기하겠다. 우주용 로봇에도 EtherCAT이 상당히 많이 적용되고 있다. 2주 전에 NASA에 출장을 갔었는데, EtherCAT을 우주에 적용할 때 새로운 기술그룹이나 유저그룹이 필요한지에 대해 논의하고 있다.
Q. 다른 프로토콜에서도 기가비트 프로토콜을 준비하고 있다. 그러나 그들은 기가비트를 필요로 하는 어플리케이션이 얼마나 되는지 반문을 한다.
A. 그 부분은 나도 동의한다. 기가비트를 필요로 하는 디바이스가 그렇게 많을 것 같지는 않다. 그러나 광대역이 필요한 두세 개의 분명한 사례가 있다.
하나는 비전이다. 카메라가 계속해서 돌아가고 있다면 100메가비트는 충분하지 않다. 또 정밀 계측기를 생각해볼 수 있다. 예를 들어서 4개의 아날로그가 24비트 속도로 300개씩 들어온다고 가정해보자. 이렇게 되면 광대역이 굉장히 많이 잡아먹게 된다. 마지막 사례는 EtherCAT을 만든 Beckhoff의 사례다. Beckhoff의 XPlanar 시스템을 케이블로 비교를 해보면 케이블 위를 날아다니는 타일조각들이 있는 모습이다. 무버라고 부르는 조각들이 자기장 위에 떠있는 형상이다. 이 시스템은 이미 EtherCAT G를 사용하고 있다. 이처럼 많지는 않지만, 더 많은 광대역을 필요로 하는 시스템들이 있다.
그러나 대부분의 어플리케이션은 100메가 비트를 사용한다. EtherCAT은 특히나 100메가비트가 다른 회사보다 중요하다. 왜냐면 우리 100메가비트가 워낙 빠르기 때문에, 이 정도의 속도를 내려면 다른 기술들은 기가비트를 사용해야 할 것이기 때문이다.
Ⅱ. ETG 멤버 미팅
기자간담회에 이어 오후에는 ETG 멤버 미팅이 이어졌다. ETG 멤버 미팅은 코로나로 인해 3년 만에 개최됐다.
ETG Korea 협회장 문용선 교수는 환영사를 통해, 코로나 이전에는 스마트 공장이나 4차산업혁명이 화두였는데, 코로나가 끝나가는 무렵 많이 듣게 되는 단어는 인공지능이나 자율자동차로 대변되는 오토노머스 시스템(Autonomous System)이라고 말했다.
문 교수는 우리 시스템에 좋은 기술을 적용해서 좀 더 좋은 시스템이 되도록 만드는 것이 스마트공장, 자율시스템이 아닐까라고 말하고, 원래 목적을 찾기보다는 내 시스템에 좋은 기술을 적용해서 어떻게 개선할 것인가를 생각하는 것이 목적에 부합되는 것이라고 피력했다.
이어 ETG Korea 오피스 정명오 부장이 ETG Korea 활동에 대한 발표를 진행했다. 정 부장은 EtherCAT은 발표된 지 20여 년이 됐으며, 꾸준히 성장하는 네트워크라고 말했다. ETG 회원사 유형을 보면 밴더가 50여 개이며, 장비 제조사가 전체의 25%, SI 업체가 6%를 각각 차지한다.
1. EtherCAT 신규 사례 발표-Martin Rostan/ EtherCAT Technology Group Executive Director

Martin Rostan ETG Executive Director가 ETG 뉴스 및 개요 등에 대해 발표를 진행하고 있다. (사진 ETG코리아)
이어 Martin 디렉터가 ETG 뉴스 및 개요 등에 대한 발표를 진행했다.
신규 EtherCAT 어플리케이션이 소개됐는데, 첫 번째는 농업기계에 적용된 사례다.
존 디어(John Deere) 사는 세계적인 미국계 중장비, 농기계 제조회사로, 운전자가 없고, 대형 케이블로 파워를 제공하는, 10년, 15년 후를 위한 자율주행차를 계획하면서, 2008년부터 EtherCAT을 사용하고 있다.
이 회사는 주기를 더 짧게 만들어야 하고 워낙 다양한 디바이스를 사용하고 있기 때문에, 프로토타입이 용이해야만 했다. 1킬로미터짜리 라인이고, 300키로와트가 사용될 수 있고, 케이블이 자동적으로 풀렸다가 다시 자동적으로 말리게 되는데, 이렇게 되면 전선이 다치질 않는다. 자율주행이기 때문에 선의 위치와 트랙터의 위치가 자동적으로 관측될 수 있고, 그렇기 때문에 이 케이블을 관리할 수 있게 된다. 농업이 이렇게 새로운 기술로 새로운 시대가 열리고 있다는 것을 보여주는 흥미로운 사례다.
다음은 Borncut A/S라는 덴마크 식품회사의 사례다. 이 회사는 생선과 육류를 자르는 시스템을 제조하고 있다. 예를 들어 유럽에서 연어를 수입하면 200~250KGg 단위로 포장을 하게 된다. 이렇게 포장을 하기 위해서는 정밀하게 자를 필요가 있다. 이 기계는 라인 두 개가 구동이 되면서 분당 백번 정도 아주 빠르게 자르게 된다. 이렇게 되면 굉장히 많은 생선류와 육류가 가공이 되는데, 이때 정밀성이 대단히 중요하다. 정밀도를 0.5% 높였을 때, 연간 원자재 가격을 17만 유로 절약할 수 있다는 결과를 보여줬다. 잘려 나가는 생선이나 육류를 절약할 수 있기 때문이다. 200그램이라고 하면 정확하게 200그램, 250그램이라고 하면 정확하게 250그램이어야 한다. 255그램만 돼도 5그램을 무료로 주는 것이 되기 때문이다. 이 회사는 이런 정밀함을 위해서 EtherCAT을 사용하고 있다. 프로토타입 제작도 대단히 쉽다. 이 식품을 스캐닝하게 되고 스캐닝에 따라서 정밀하게 자르게 된다. 대단히 빠르게 칼이 움직이기 때문에, 벨트의 모션과 동기화가 정밀하게 이루어져야 한다.
다음은 주요 과학기관들의 사례다.
우선, 칠레에 건설 중인 Giant Magellan Telescope 사례다. 대형 마겔란 망원경이 칠레에 건설 중에 있다. 아타카마 사막에 건설이 되고 있는데, 여기에 EtherCAT을 전체적으로 적용을 한다. 단순히 건물에만 적용하는 것이 아니고, 건물 자체의 자동화와 외피에도 적용을 하고 있다. EtherCAT이 이 망원경 전체 시설에 적용이 될 예정이다. 3천 개의 모션이 들어가는 망원경으로, 적응적 복합기를 사용하기 때문에, 건물이 공기에 따라서 계속 보정을 해서 움직이게 된다. 대형 광학 망원경의 크기가 대단히 크다는 점에서 흥미롭다. 유럽 남부 관측소의 망원경 역시 칠레에 건설이 됐고, 하와이에 지어지고 있는 망원경의 거울의 크기는 굉장히 큰데, 이 대형 망원경 모두 EtherCAT을 사용하고 있다. EtherCAT은 과학계에서도 상당히 주목을 받고 있다는 것을 알 수 있다.
다음은 이스라엘 Yeliot Aharonot Building의 건물자동화 사례다. 여기에서 EtherCAT을 사용하는 이유는 건물자동화를 위한 제어시스템에서 비용절감 효과가 있기 때문이다. EtherCAT을 건물자동화에 많이 사용하진 않지만, 대형건물에서 점점 더 많이 사용해서 조명을 제어하거나, 공기를 정화하거나 에어컨 시스템에 적용이 되면서 비용절감을 실현하고 있다.
다음은 원유업계의 사례다. 중국회사의 오일리그 사례로, 이 전체 구조물을 모니터링할 때 고속 진동 검증을 하게 된다. 48개의 센서를 가지고 일초 당 50키로 이상 분을 분석하게 된다. 34메가비트의 정보처리 능력이 필요한데, 이를 위해 EtherCAT을 사용하고 있다. 이 건물의 진동을 분석해서, 이 구조물이 계속해서 건전할 것인지 건전성을 테스트하게 된다.
다음은 우주산업의 사례로, 독일의 DLR 즉, 독일우주산업국에서 EtherCAT을 사용하고 있다.
DLR 경우에는 콜로라도 스프린스 전시에서 이것을 전시하면서, EtherCAT 도구를 같이 달았다. 카나덤이라는 우주로봇을 만든 제조회사와 ETG가 백서를 함께 만들었다. 우주와 관련된 국제회의가 미국에서 10월에 개최될 예정인데, 국가우주항공국에서 개최하는 이 회의에도 자료를 제출한 바 있다. EtherCAT이 우주로봇에서도 많은 관심을 받고 있다.
EtherCAT 아키텍처: 컨트롤러로 공장 네트워크와 필드버스를 분리해야 한다.
자동화 아키텍처는 이제 피라미드 시대는 지났다. 새로운 아키텍처는 자동화된 네트워크에 서로 연결이 된 모습을 하고 있다. 더 이상 계층적이지 않다.
ETG 일본 파트너가 액티브 스마트 팩토리 혹은 IT 시스템에 대해 다양한 오픈 프로토콜을 실시간으로 활용하고 있다. EtherCAT 또한 이런 실시간이 가능하다. 프로피넷이나 CC-Link 등 모두 한 네트워크에 모든 것을 다 포함시키고 있다. 이를 통해 전 세계 어디서나 연결이 될 수 있게 되고, 모션, PLC, 필드버스 다 연결이 되어 있다. 경쟁사들은 이것을 EtherCAT과의 차별점이라고 프로모션하고 있다.
그러나 EtherCAT은 네트워크가 분리되어야 한다고 생각한다. ETG는 기계와 공장은 네트워크가 분리되어야 하고, 이 분리는 컨트롤러로 이루어져야 한다고 생각한다. 물론 컨트롤러 연결도 필요하다. 컨트롤러는 확정적인 컨트롤도 필요하다. IO, 컨트롤, 센서 컨트롤 어떤 것이든 확정적인 것이 필요하다. 그리고 공장 네트워크(Factory Network)와 머신 네트워크는 분리가 돼야 한다. 다들 분리가 필요없다, 합쳐져야 하다고 생각하지만, EtherCAT은 분리가 돼야 한다고 생각한다. 공장 네트워크와 머신 네트워크를 분리해야만 프리 컨피규레이션이 된 머신을 현장에 가져가서 연결하면서, 나머지 네트워크의 영향을 받지 않을 수 있다. 다 연결이 되어있고 독립이 되어있지 않다면 이러한 프리 컨피규레이션이 가능하지 않다. EtherCAT처럼 하면 더 이상 필드버스 세팅의 변경이 전혀 필요 없다.
예를 들어 로봇 3대를 납품하게 된다면 같은 IP주소를 사용하게 된다. 그러나 만약 다른 경쟁 프로토콜처럼 모두 연결이 되어있다면 그렇지 않다. EtherCAT처럼 분리를 하게 되면 필드버스의 성능이 윗단과 분리가 된다. 그렇게 해야만 컨트롤러를 보호할 수 있고, 사이버 공격으로부터 효과적인 보호가 가능하다. 왜냐 하면 이렇게 해야만 내부와 외부가 직접 연결이 안 되기 때문이다. 물론 간접적인 터널 트래픽은 가능하다. 노드를 외부에서 사용할 수 있게 된다. 그렇지만 직접적으로 인터넷이나 공장 네트워크와 연결되어 있지는 않다. 다른 프로토콜 회사들의 애기를 들어보면 다 하나의 네트워크다. 스위치는 있지만 연결이 되어있다. 이런 머신 네트워크를 공장 네트워크와 연결해 본다면 스위치만 있고 분리가 없다. 그렇게 되면 세팅을 현장에서 다시 조정을 해야 한다. 노드 주소도 그대로 사용할 수 없고, 분리해야 한다. 그렇게 되면 IP주소를 다 하나하나 적용해야만 한다. 뿐만 아니라, 사이버 보안을 노드마다 적용을 해야 한다. 그리고 책임이 불확실하다.
경쟁 프로토콜들은 모든 것을 하나의 네트워크로 연결하라고 프로모션을 하고 있다. 현재 사이버 보안이 화두가 되고 있는데, 이렇게 하면 디바이스가 더 많이 외부에 연결이 되고, 노출이 된다는 것을 깨닫고 있다. 이런 깨달음을 바탕으로 움직임이 생기고 있다. 따라서 사이버보안에 대해 집중을 할 수밖에 없는 상황이 됐다.
보안 아우트 라인이 나왔는데, 이 아우트라인을 보면 CC-Link에서 기존 시스템보다 보안의식이 더 높아져야 한다고 얘기하고 있다. 이렇게 노출이 되면 당연히 보안이 더 중요해질 수밖에 없다. 경쟁 프로토콜들은 아직까지 보안 프로토콜이 없는 상황이다. 이와 관련해서 각종 인증이 필요한 상황이다. 그러나 EtherCAT은 이럴 필요가 전혀 없다.
EtherCAT과 사이버 보안
사이버 보안이 EtherCAT에 중요하지 않은 것은 아니다. 아주 중요하고, 분명히 조치를 취해야 하는 부분이다. 어떤 시스템이든 공격을 받을 수 있다. 공격을 받을 때 얼마나 많은 노력이 들어가느냐가 중요하다. 따라서 공격을 할 때 귀찮게 만들어줘야 한다.
예를 들어서 방화벽이 있다면 이 방화벽을 뚫는 것은 가능하다. 재원만 충분하면 얼마든지 뚫을 수 있다. 그러나 이것을 뚫는 것을 어렵게 만들어서 좀 더 쉬운 시스템을 뚫도록 만들어야 하는 것이다. 만약 우리 시스템이 이웃 시스템보다 좋다면 우리 시스템을 공격할 필요가 없다. 예를 들어 집이 5~6채 있을 때 도둑은 침입이 쉬운 집을 침입한다. 사이버 보안도 마찬가지다. 집에 단순히 자물쇠를 큰 걸 채우는 것은 도움이 되지 않는다. 멀웨어의 경우는 인터넷 프로토콜 IP가 필요하다. 바이러스도 IP가 필요하다. IP가 없으면 네트워크가 연결이 되질 않기 때문이다. IP는 라우터를 통해 들어간다. 이더넷이 있으면 거기까지 밖에 가질 못한다. EtherCAT은 당연히 이더넷 프레임워크에 들어간다. 이더넷 프레임워크에 임베딩이 되어있고, 인터넷과 연결이 되어있지 않다. 이더넷 프레임에 자료가 있다. EtherCAT의 경우에는 전용 리더 타입이 있다. 리더 타입이 없는 프레임이라면 필터가 걸러내게 된다. 하드웨어로 걸러낸다. 그렇기 때문에 들어올 수가 없다. 따라서 EtherCAT 트래픽이 아닌 경우에는 EtherCAT 네트워크 안으로 들어올 수가 없다. 하드웨어 자체가 그렇게 만들어져 있다.
아니면 슬레이브 디바이스를 추가해서 침입할 수 있을까? 마스터가 이것을 부팅하지 않으면 사용할 수가 없다. 마스터가 부팅해주지 않는다면 무용지물이다. 데이터를 변경하려고 해도 마스터에 부팅이 되어야 한다, 그리고 포트 중에 사용이 되지 않는 경우에는 마스터가 이것을 잠글 수가 있다. 따라서 잠긴 포트에 뭔가를 플럭인 하면 사용할 수가 없다. 이것이 EtherCAT 칩의 특성이다.
EtherCAT 슬레이브가 변경이 될 수 있을까? 이론적으로 가능하다. 그러나 굉장한 노하우가 필요하고 수년간의 노력이 필요하며, 디바이스를 공장 안으로 들여와서 아무도 모르게 연결해야만 한다. 따라서 이론적으로는 가능하다. 그러나 실제적으로는 가능하지 않을 것으로 본다.
와이어샤크(Wireshsark)나 이더캣프로브(EtherCAT Probe)가 시스템에 영향을 줄 수 있을까? 그렇지 않다. 왜냐 하면 프로브는 데이터를 변경시킬 수 없고 볼 수만 있기 때문이다. 따라서 EtherCAT 프로브를 이용해서 침입할 수 없다. 그러나 마스터는 보호가 필요하다. 마스터는 외부로부터 보호가 되어야만 한다.
그리고 EtherCAT을 통한 이더넷(Ethernet over EtherCAT)에 대해 걱정을 한다면, 이것을 통해서 하단까지 연결이 되기 때문에 이것을 사용중지 시키면 된다,
지금까지의 내용을 정리해보면 EtherCAT은 IP 기반이 아니다. EtherCAT 칩이 알려있지 않은 트래픽을 걸러낸다. 슬레이브 디바이스도 침입할 수 없다. 마스터는 보호가 필요하다. 그러나 이것은 우리 범위 밖을 벗어난다. EtherCAT과는 상관이 없는 것이다. EtherCAT과는 상관없이 마스터는 당연히 보호가 되어야 한다. 따라서 EtherCAT은 강력할 뿐만 아니라, 사이버 공격에 대해 상당히 견고하다. EtherCAT 아키텍처는 EtherCAT 슬레이브에 대한 보호가 필요없는 구조다. 이 부분이 산업용 이더넷에 굉장히 중요해질 것이라고 본다. 차후에 사이버 보안이 대단히 중요해질 것이다.
2. EtherCAT AI 적용사례-레드원 테크놀로지 문용선 이사

레드원 테크놀로지 문용선 이사가 EtherCAT AI 적용사례에 대해 발표를 하고 있다. (사진 ETG코리아)
레드원테크놀로지 문용선 이사는 EtherCAT에서 가장 리딩하고 있는 Beckhoff 제품이 어떻게 AI에 대해 준비하고 있고, 적용하고 있는가에 대한 트렌드를 가지고 AI를 설계하고 적용해본 사례를 발표했다.
문 이사는 산업계의 몇 가지 패러다임의 변화에 대해 설명했다.
첫 번째 가장 중요한 변화는 매스 프로덕션에서 매스 커스터마이제이션으로의 변화다. 지금은 커스터마이징이 되면서 대량생산이 돼야 한다는 트렌드의 변화가 존재한다.
두 번째는 지금까지 우리가 생각했었던 오토메이션(Automation) 시스템에서 오토노미(Autonomy) 시스템으로의 변화다. 오토메이션은 사람이 그렇게 하고자 정해주면 시스템이 그대로 하는 것이고, 오토노미는 사람이 정해주더라도 시스템이 알아서 자율로 스스로 뭘 할 수 있는 능력이다. 이러한 또 하나의 패러다임의 변화가 있었다.
한편, 한국에 큰 변화가 있었다. 한국이 공식적으로 개도국에서 선진국으로 인정을 받았다. 따라서 우리는 개도국이 아닌 선진국으로서, 기술을 리드해 나가야 하는 패러다임의 변화를 맞고 있다.
지금 하고 있는 대부분의 일들이 이런 범주에서 벗어나지 않을 것으로 생각된다.
초연결사회 이전의 연결사회는 시스템만 연결이 됐다면, 지금의 연결사회는 사람과 기계가 같이 연결되는 사회다.
그다음은 초지능과 디지털 트랜스포메이션이다
공장자동화에서는 EtherCAT에 대해 이제는 좋다 나쁘다 얘기할 것 없이 자연스럽게 받아들여지고 있다. 공장자동화에 모션(Motion)이 들어가게 되면 EtherCAT이 최고다.
지금까지의 지능이라는 것은 사람이 알고 있는 지능인데, 그 지능을 기계가 어떻게 알게끔 할 것인가? 즉, “사람이 가지고 있는 지능을 어떻게 공장자동화에 넣어서 잘 돌아가게 할 것인가?” 하는 것이 트렌드의 변화다.
과거에는 사람이 지능을 가지고 있다고 한다면, 기계가 AI로 간다고 하면 지능은 모두 기계가 가지고 있다고 생각할 수 있다. 제어기에서 사람이 갖는 지능을 넣어서 이 지능을 가지고 모든 장치들이 동작하게 해야 한다는 것, 사람이 갖는 지식을 갈아 넣는 과정, 이것을 디지털 트랜스포메이션이라고 얘기한다.
인간지능을 인공지능으로 바꿔야 하는데, 인간지능이라는 게 무엇인가? 인간지능이란 두뇌에서 하고 있는 활동들 즉, 시각처리, 추론, 플래닝, 학습 이런 카테고리에서 일어나고 있다. 지금은 모든 것이 강인공지능이다. 인공지능은 인간지능을 기계가 할 수 있도록 사람이 만들어 놓은 것이다.
인공지능도 AI(인공지능), 기계 학습, 딥러닝이라는 카테고리가 있다.
사람이 가진 지능을 어떻게 하든 간에 기계가 하도록 하는 것은 인간이 만든 지능이라고 하고, 머신러닝은 시스템을 기계가 알아 볼 수 있도록 수식화해서 많은 데이터를 가지고 구현하는 것이며, 기계학습을 네트워크에 의해서 하게 하는 시스템이 딥러닝이다.
Beckhoff는 이런 시스템을 어떻게 구현하려고 하고 있을까?
Beckhoff 매뉴얼을 보면 TF3800에서 인공지능의 큰 기술적 카테고리를 슈퍼바이즈드 러닝, 언슈퍼바이즈드 러닝, 임파시블 러닝으로 나누고 있고, 이것은 Classification, Regression, Clustering와 같은 행위로 나뉘어진다.
우리는 우리가 풀고자 하는 문제를 리그레션으로 풀까, 클래피케이션으로 풀까, 강화학습으로 풀까? 이 문제에 카테고리가 하나씩 다 들어갈 수 있다. Beckhoff에서는 그것을 하는 방법을 생각했다. 자동화 시스템이 인공지능 시스템으로 되려면 좀 더 많은 영역에서 사람이 했던 것을 적게 하고, 나중에 사람은 목표만 주면 일이 진행될 수 있도록 하는 시스템을 이야기하고 있다.
인공지능 시스템은 인간이 처리하는 부분을 많은 데이터를 가지고 해야 될 알고리즘이 많기 때문에, Beckhoff 임베디드 시스템에서 구현할 수 있는 방법이 있지만, 그것을 충분히 할 수 있는 공간이 부족하다는 생각에, Beckhoff 시스템에 다른 임베디드 시스템을 붙여넣고, 이 사이는 이더넷으로 연결해서, 이 부분은 제어시스템으로 하고, 학습러닝은 다른 쪽에서 할 수 있도록 하는 아키텍처를 가지고 있다.
소프트웨어적으로는 Beckhoff TwinCAT을 사용한다. EtherCAT을 사용한 제어시스템에서 데이터를 게더링하고, 레이블에서 데이터를 만들어서 네트워크 환경을 구축하는 모델을 만든 다음에 학습시켜서, 그 결과를 ONNX라는 모델로 트랜스퍼를 시켜서, EtherCAT으로 다운로드한다. 이런 학습과정과 추론과정에 사용할 수 있는 아키텍처를 구성하고 있다.
문 이사는 TwinCAT, 강화학습을 이용한 진동제어(제진) 시뮬레이션을 소개했다. 진동제어는 장비의 기계적인 움직임으로 발생하는 공진 및 장치의 흔들림을 제어하는 기술로서, 진동시스템을 제어에는 디지털 필터 방법과 인풋 세이핑(Input Shaping) 방법이 있다.
필터링 방법은 필터를 이용해서 노이즈를 제거하는 방법이고, 인풋 세이핑은 예상되는 진동과 노이즈를 입력해서 제어할 수 있도록 세이핑해서, 다단계 스탭을 넣어 진동을 없애는 방법이다.
현재까지는 진동이 발생하면 디지털 필터링이나 인풋 세이핑을 이용해서 진동을 없앨 수 있다. 이렇게 해결할 수 있는데 왜 인공지능을 적용해야 하나? 이것은 정적으로 할 수 있는데, 사용하다가 시스템이 노화돼서 진동이 더 많아지면 자동으로 그것을 잡을 수 없을까라는 생각에서, 시스템의 변화에 따라서 능동적으로 스스로 진동을 잡는 것을 인공지능으로 해결해보자는 생각에서 시도가 됐다. TwinCAT 시스템에 외부와 연결할 수 있는 Pyads가 있고, Pyads에서 데이터를 받아서 여기서 메타 강화학습을 구현한 다음에, 이걸 이용해서 TwinCAT System을 적용한 진동모듈을 학습 시킨 사례다.

TwinCAT과 인공지능 프로세서 구성
3. 반도체 시장을 목표로 하는 장치 제조업체를 위한 EtherCAT의 적용과 준비-인캣 김영정 대표

인캣 김영정 대표가 반도체 시장을 목표로 하는 장치 제조업체를 위한 EtherCAT의 적용과 준비를 주제로 발표를 하고 있다. (사진 ETG코리아)
인캣에서는 반도체 장비 적용 진행 절차 등 실무적인 내용에 대해 발표했다.
인캣은 2017년 LS일렉트릭 계열사 연구소 관련 팀장의 경험을 기반으로 창립된 회사로, EtherCAT 슬레이브를 전문으로 개발하고 제조하고 있다. ETG5003 반도체 디바이스 프로파일을 포함한 고객사 제품공급사다.
Lam, 어플라이드 머티리얼즈, TEL을 비롯해서 LS일렉트릭이나 모벤시스, 오므론, INOVANCE 등의 업체 마스터와 연결이 가능한 이더캣 슬레이브를 제공하고 있으며, 이들과 스택의 최적화 작업이 되어 있다.
ETG5003은 반도체 디바이스에 관한 표준으로, 크게 CDP(Common Device Profile)와 SDP(Specific Device Profile)의 두 부분으로 구성이 된다.
DeviceNet과 Lonworks가 반도체 분야에 많이 적용이 되고 있었는데, 최근에는 급격하게 EtherCAT으로 바뀌고 있다. Lam, 어플라이드 머티어리얼즈, TEL 이 글로벌 3개 사가 신제품에 무조건 필수적으로 EtherCAT을 적용하는 추세다.
반도체에는 매스플로 컨트롤러나 모 업체의 진공펌프, 칠러 등 많이 사용되는 디바이스들이 있다. 다양한 디바이스들이 있는데 이런 걸 SDP라고 보면 되고, ETG5003 표준에서 이런 여러 가지 디바이스들의 공통적인 프로파일을 CDP라고 보면 된다.
공통 장치 프로파일(ETG 5003.1)은 모든 반도체 EtherCAT 장치가 준수해야 하는 모든 일반 요구사항을 지정한다. 여기에는 하드웨어 및 소프트웨어 요구사항이 모두 포함된다. 특정장치 프로파일은 CDP를 기반으로 하며, 특정 유형의 장치에 대한 데이터 요구사항을 정의한다. SDP는 ETG Semiconductor TWG가 다양한 장치 제조업체와 협력하여 개발했다. SDP는 CDP와 결합하여 전체 사양을 만든다.
메인 마스터 업체들이 ETG5003으로 데이터를 올려달라고 요구하게 되면 슬레이브를 장착해야 하는 칠러 업체나 진공펌프 업체들은 당황스럽다. 더구나 해외기준까지 받아올 것을 요구하면 더욱 혼란스럽다. 이럴 때 인캣과 같은 EtherCAT 전문업체에 맡기는 경우가 많아지고 있다.
일반적으로 ETG7000.2 테스트 레코드를 기준으로 해서 시험을 받으면 인증서가 나오는데, 반도체 분야는 ETG 7000.2 Annex 5003.0001 S를 추가적으로 받아서 두 가지를 받아야 한다.
이와 함께, 노드 주소 지정의 3가지 지정 방법, ETG. 5003 로터리 스위치의 마킹 표기법, 반도체 메인 장비사 EtherCAT 가이드라인, 반도체 장비 적용 진행 절차, EtherCAT 게이트웨이의 적용 등에 대해 설명을 했다.
반도체 장비 시장을 목표로 하는 특정 장치 제조사가 반드시 ETG. 5003, ETG.7002 등을 포함한 모든 내용을 숙지하고, 직접 해당 기능의 EtherCAT 모듈을 제조할 필요는 없다. 인캣 게이트웨이와 고객사 장치 간은 기존 보편적인 시리얼 통신으로 연결하고, 나머지 EtherCAT 부분은 인캣 게이트웨이를 적용하면 된다. 인캣은 게이트웨이를 통해 마스터 업체를 다수 연결시켜왔다.
4. 로봇을 위한 서보드라이버의 EtherCAT 통신 개발-한국기계연구원 로봇 메카트로닉스연구실 서현욱 선임연구원

한국기계연구원 로봇 메카트로닉스연구실 서현욱 선임연구원이 로봇을 위한 서보드라이버의 EtherCAT 통신 개발을 주제로 발표를 하고 있다. (사진 ETG코리아)
한국기계연구원 로봇 메카트로닉스연구실에서는 EtherCAT이 적용된 서보 드라이버를 개발해서 로봇에 적용하려고 하고 있다. 한국기계연구원 로봇 메카트로닉스연구실 서현욱 선임연구원은 로봇에서의 EtherCAT 드라이버 개발 배경과 로봇을 위한 서보 드라이버에 왜 EtherCAT이 필요한지, EtherCAT 드라이버의 장점과 단점에 대해 발표했다.
최근 소프트웨어 및 하드웨어 기술의 발전하면서, 산업용 로봇에서 협동로봇으로 로봇의 트렌드가 바뀌고, 로봇이 일반인들 주변으로 가까이 가는 방향으로 로봇이 개발되고 있다. 협동로봇에 필요한 여러 가지 기술이 있겠지만, 그중에서 한 가지만 꼽는다면 고성능의 통신기술을 가진 서보 드라이버라고 할 수 있다. 산업용 로봇은 굉장히 크고 한 곳에 고정돼서 업무를 수행하지만, 협동로봇은 이동하면서 사람과 같은 공간에 있고 여러 가지 유틸리티를 가져야 되기 때문에, 모터와 서보 드라이버가 일체형으로 구성된 모듈을 요구하게 되고, 이 모듈이 각 관절단에 들어가서 서로 유기적인 통신을 빠른 실시간 영역에서 수행하게 된다.
기존에 산업용 로봇은 제어박스와 로봇이 나눠진 형태로 구성이 됐는데, 최근에 개발된 많은 산업용 로봇들은 로봇 안에 컨트롤러와 드라이버, 모터가 전체적으로 이어지는 체인구조를 가지게 된다. 이렇게 됐을 경우에, 드라이버와 드라이버 사이와 로봇과 로봇 관절 내에서 이동을 하게 되고, 로봇의 실시간적인 성능을 높이기 위해서는 각 드라이버가 토크지령이나 위치지령을 매우 실시간으로 빠르고 정확하게 받아야 하기 때문에, 동기통신을 필요로 하게 된다. 따라서 전기연구소에서 개발하는 로봇에 적용하기 위해 소형 서보 드라이버를 개발했고, 개발함에 있어서 EtherCAT을 적용시켜서 드라이버가 동작을 하게 하기 위해서, EtherCAT IC가 들어간 보드를 추가적으로 개발해서 서보 드라이버 안에 내장하는 방식으로 개발을 했다.
처음에는 모듈을 사서 끼우는 방식으로 게이트웨이를 꽂아서 했는데, 게이트웨이로 할 경우 DC(Distributed Clock)라든지 기타 통신속도가 제한이 되고, 데이터도 처음에 특정 제품에서 정해놓은 갯수 등에 의해 제한이 되기 때문에, 처음에 ESC 칩을 사용해야 됐고, SPI를 쓸지 버스통신을 쓸지 등 통신적 선택을 하게 됐다. 처음에는 사용하는 DS계와 연결되어 있는 EVM 모듈을 사용해서 개발을 했고, 처음 적용하는데 애를 많이 먹었다.
이걸 기반으로 해서 아예 서보 드라이버에 적용할 수 있는 하드웨어 EtherCAT 보드를 개발해서 실제 적용을 했고, SSC에서 C2000 CPU에 SDK를 제공했기 때문에, 이것을 바탕으로 개발하여 현재 서보 드라이버에 EtherCAT 지령에 대한 응답성이나 기타 안정성에 대해서 검토를 하며, 모터의 알고리즘 변경에 따라서 어떤 영향을 미치는지와 EMI 특성 등을 검토하고 있다.
로봇 쪽에서 봤을 때 EtherCAT을 처음에 선택하게 된 이유는 DC(Distributed Clock)가 가장 컸다. 기존에 프로피넷이라든지 CAM, SPI 등 구동기 통신을 썼을 때는 로봇은 각 관절관절이 직렬로 기구적으로 이어져 있기 때문에, 하나가 흐트러졌을 때 말단에서의 정밀도가 크게 차이가 나서 그 실시간성의 응답속도가 대단히 중요해진다. 그걸 보완하기 위해서 DC라는 기능이 필수적으로 필요하게 됐고, DC를 적용한 드라이버로 모터를 다수 로봇 구성에 따라서 여러 개 동시에 제어하는 구성으로 여러 가지 연구를 하고 있다.
이 부분은 보안이나 안정성 측면에서는 장점으로 보일 수 있는데, 로봇이라는 어플리케이션에서 로봇이 산업계에 쓰이고 비정형적인 물건의 디바이스를 다뤄야 되는 입장에서는 EtherCAT이 비정형적인 디바이스에 접촉하는 부분에 고민을 많이 하게 됐다. 예를 들어서 로봇 말단에 그리퍼라든지 작업기, 조작기, 핸들 같은 장비가 붙었을 때 그 장비의 인터페이스가 EtherCAT으로 구성됐을지, ADC, DIO, CAN이나 기타 비동기통신으로 주어졌을 때 비동기통신일 때는 성능이 떨어질 수밖에 없다, 그러면 결국은 로봇과 같은 동기통신 DC가 가능한 통신으로 들어와야 될 때 그 장비를 붙이기 위해서는 로봇의 메인 마스터에서 스캔을 하는 과정이 필요해진다. 이런 부분은 연구실에서는 문제가 없지만, 로봇이 실제 산업계 소비자 가까이 가기 위해서는 고민할 부분이라고 보인다.
현재 로봇은 산업용 로봇에서 협동로봇으로 좀 더 콤팩트하고 다양한 유틸리티 개발자의 손에서가 아니라 사용자의 손에서 여러 유틸리티를 가질 수 있는 방향으로 개발이 되고 있고, 각 모듈에 필요한 동기통신이 되는 드라이버 기술이 필수적이다. 여기서 EtherCAT은 고성능의 동기통신 기술이 장점으로 부각이 되고 있고, 안정성과 보안성을 바탕으로 하는 확장성에 대한 보완이 필요하다.
5. 260축 모터의 단일 마스터 제어 및 마스터 부하-한국전자기술연구원 지능 로보틱스 연구센터 김정훈 연구원

한국전자기술연구원 지능 로보틱스 연구센터 김정훈 연구원이 260축 모터의 단일 마스터 제어 및 마스터 부하를 주제로 발표를 하고 있다. (사진 ETG코리아)
한국전자기술연구원 지능 로보틱스 연구센터 김정훈 연구원은 최근에 구현하게 된 260축에 대한 구현과정에서 260축을 마스터 하나로 제어했을 때 부하가 어떻게 될 것인가, 내부에 있는 소프트웨어를 이런 구조로 했을 때 어떤 결과를 낼 것인가에 대한 연구에 대해 발표를 진행했다.
하드웨어와 소프트웨어를 동시에 개발할 때 대부분 하드웨어를 설계하고 만드는데 시간을 많이 쓰게 되고, 제어부는 시간이 촉박하게 진행되는 경우가 많다. 그래서 한국전자기술연구원 지능 로보틱스 연구센터는 2008년부터 EtherCAT을 적용해서 구현시간을 줄여왔고, 다양한 시도를 해볼 수 있는 환경을 만들어왔다.
최근에 종료된 프로젝트는 풍력발전에 대한 검사, 청소도 함께 할 수 있는 플랫폼에 대해서 각축에 동기제어가 필요했기 때문에, EtherCAT을 사용해서 진행을 했다.
다양한 장거리 경우에 케이블을 반영하면 먼 거리에서도 동기화가 잘 되는 성능을 확인해왔다.
이번에 한국전자기술연구원 지능 로보틱스 연구센터가 구현한 어플리케이션은 20×13의 메트릭스인데, 이것은 원래는 LED라서 여기에 영상이나 그래픽과 연동해서 동작을 할 수 있는 시스템이라서 정확한 시간에 정확한 위치에 가주는 것이 필요했고, 그 260축을 제어하는데 사용된 마스터에 대해 고민이 많았던 건 이 다양한 축에 대해서 어느 정도 부하를 가질 것인가 예측하기 어려웠기 때문이다.
LS메카피온의 서보 드라이버를 적용해서 구현을 했고, 소프트웨어만 구현하는데 걸린 시간은 총 40시간 정도다. 약 3일 정도 걸려서 상위 모션을 생성하는 소프트웨어와 하위에서 TwinCAT으로 모션을 제어하는 소프트웨어 구현이 완료된 이 매력 때문에 TwinCAT을 주력시스템으로 반영해서 사용을 하게 됐다.
TwinCAT 2.0 버전부터 계속 EtherCAT을 사용해왔는데, 그때 당시만 해도 실시간성이 반영이 되어있지 않았고, 슬레이브 쪽에서도 고속으로 응답해줄 수 있는 드라이버들이 많지 않았기 때문에, 슬레이브부터 모두 직접구성을 해서 사용을 했었다. 그런데 최근에는 EtherCAT 드라이버들이 성능이 많이 좋아졌고, 처음에 사이클링 성능이 얼마나 돼야 하는지 데이터가 없을 때는 10키로헤르츠 주기를 목표로 슬레이브를 제작해서 사용을 했었다. 사용해 보니까 고성능 EtherCAT 슬레이브에서는 4키로헤르츠 정도는 성능이 충분하다고 판단돼서, 현재는 슬레이브를 제작하지는 않고 상용품으로 구현을 하고 있다.
EtherCAT과 TwinCAT을 사용하게 된 이유는 실시간성이다.
EtherCAT은 실시간 성능 면에서는 최고의 성능을 보이고 있고, 다양한 슬레이브들을 유기적으로 구성할 수 있다. 연구를 진행하다 보면 시스템을 구성했더라도 별도의 센서가 더 필요한 경우가 많다 기존에 모듈 형태로만 제작을 했다면 변경을 하기가 힘들었겠지만, 지금은 슬레이브만 더 사다가 구성하면 센서 등 모든 추가를 할 수 있기 때문에, 로봇 개발 측면에서 좋은 도구로 사용을 하고 있다. 그 슬레이브들이 전장을 구성할 때도 빠른 시간 내에 간단히 구성이 가능하기 때문에, 이런 면에서 EtherCAT을 사용하고 있다.
TwinCAT은 소프트웨어인데, 다른 모듈들을 사용하지 않고 C++ 모듈만 사용을 하고 있다. 그런 면에서 수학공식이나 제어공식들을 반영하기도 좋은 환경이다.
A라는 입력을 줬을 때 B라는 아웃풋이 나오는, 예측한 대로 구현이 가능한 환경을 신뢰성이 높다고 하는데, 그런 면에서 신뢰성이 다양한 플랫폼을 테스트해봤을 때 좋은 성능을 보여줬다. 가격적인 측면에서도 처음 접근할 때 코드만 넣으면 일주일 동안 모든 라이선스를 활성화시킬 수 있기 때문에. 굉장한 장점으로 느껴졌다.
그리고 RTX나 리눅스를 기반으로 한 마스터 환경을 사용했을 때 코드의 로드 밸런싱이 사실 쉽지 않았다. CPU 별로 어떤 프로세스를 할당하고 분리하느냐 이런 것들이 꽤 손이 많이 가는 문제였는데, TwinCAT에서는 그런 부분들에 대해 간단히 GUI로 조정할 수 있기 때문에, 큰 장점이라고 생각한다.
모터 축이나 여러 제어 프로세스들을 바꿀 때 만약 260축이었는데 이게 300축으로 변경된다고 하면, 대략 몇 시간 이내에 모든 구성이 완료가 되는 소프트웨어적인 유연성과 확장성 때문에, TwinCAT을 쓰는 장점이 충분하다. 결국에는 이것이 생산성과 연관이 있기 때문에, 구성을 할 때 TwinCAT과 EtherCAT 구성을 사용하게 됐다.
하드웨어 구성은 리얼타임 모션 제너레이션을 해주는 PC가 한 대 따로 있고, 이 PC에 ADS 클라이언트가 구동을 하고, Backhoff EtherCAT 마스터에서 데이터를 받아다가 260개 드라이버에다 순차적으로 데이터를 보내준다. DC 클럭을 사용하지 않아도 꽤 좋은 퍼포먼스를 보여주고 있다고 생각한다.
소프트웨어 구조는 ADS 클라이언트가 다양한 소프트웨어들, 이 사례에서는 C#으로 구현된 모션 제너레이터가 데이터들을 1초 간격으로 공유 메모리에 실어준다. 한국전자기술연구원 지능 로보틱스 연구센터에서는 소프트웨어를 구성할 때 공유메모리를 많이 사용하는데, 다양한 구현 코드의 플랫폼에 상관없이 통합이 간편하고 성능도 뛰어나서 최근에 구현 중인 시스템은 이런 프로세스가 4개 정도 더 붙는다.
ADS 클라이언트가 실시간 영역의 게이트웨이 역할을 함으로써, 중계자 역할을 잘 하고 있다. 한 번에 보낸 데이터가 4.16 메가비트 정도가 되는데, 이 데이터들을 이쪽에 써주면 더블버퍼에서 비어있는 영역에 버퍼 핸들러가 데이터를 넣어주게 되고, 모터 컨트롤 쪽에서 다양한 모션 알고리즘을 넣기를 원했다. 그래서 총 5가지 정도의 트래젝토리 생성 루틴이 돌아가고 드라이버나 에러 리셋관련 핸들링을 하기 위한 부분이 따로 있다. 이 두 개의 모듈(Driver Handler, Motor Control)이 260개씩 배치가 되어있고, ADS 서버까지 해서 총 521개의 프로세스가 칩셋 내부에서 돌아가게 된다.
이쪽에는 CPU가 4개가 감지되는 시스템인데, 하나는 윈도우 영역으로 남겨두고 나머지 하나는 ADS 서버 쪽에 할당을 했고, 통신과 드라이버 핸들러 쪽은 따로 3번으로 할당했다. 가장 중요한 모터 컨트롤, 즉 트랜시플이 생성하는 부분에 대해서는 단독으로 CPU를 할당해서 구현을 했다. 약 500 헤르츠의 상태로 동작을 하고 있고, 원래는 1키로 헤르츠로 동작을 시켰는데, ADS 통신에서 약간의 딜레이가 생기는 것 같아서 500헤르츠로 주파수를 낮췄다.

하드웨어 구조
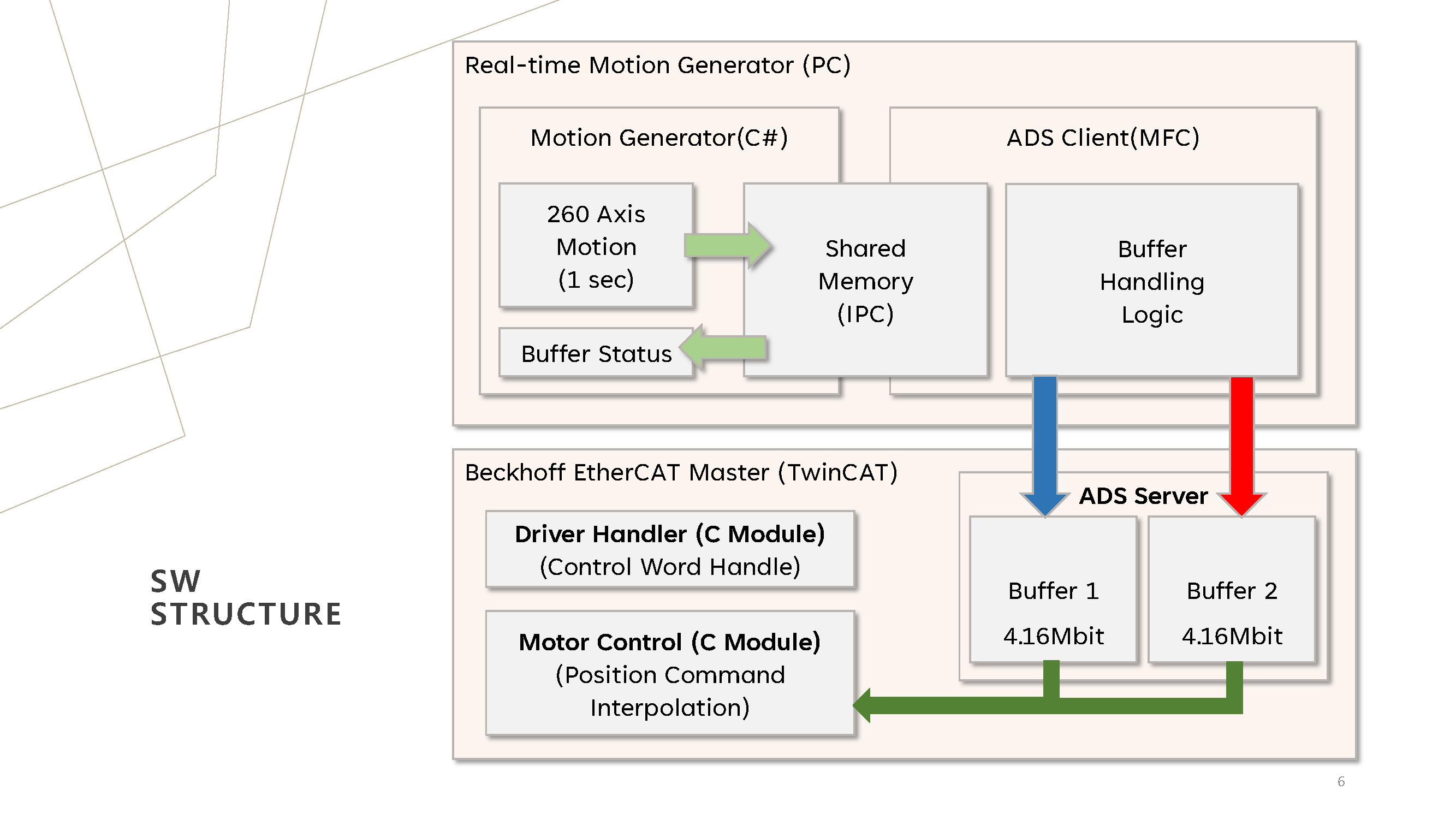
소프트웨어 구조
부하율을 보면, 모션 컨트롤 쪽은 평상시에 구동을 PTP 모션으로 해서 모션 프로젝트를 할 때는 15% 정도의 부하를 보이고 있고, 다양한 알고리즘을 돌리면서 부하를 봤을 때 최대 20% 정도 성능까지 부하값을 차지하는 것 같다. 레이턴시는 모두 1마이크로세크에서 3마이크로세크 나오는데, 이 정도는 대단히 훌륭한 레이턴시라고 생각한다.
6. EtherCAT 기술 업데이트-ETG Martin Rostan
우선 Safety 부분에 대한 기술 업데이트가 발표됐다.
Safety over EtherCAT Technology는 IEC 61784-3에 해당이 된다. 디바이스가 인증이 기 위해서는 IEC표준을 충족시켜야 되기 때문에 이 표준은 중요하다. EtherCAT은 IEC 61784-3-12를 충족하게 됐는데, 이것이 바로 Safety over EherCAT Protocol Specification이다. 이 스탠다드 내에서는 상표권 때문에 Safety over EherCAT이라고 부를 수 없어서, ETG는 Functional Safety Communication Family 12(FSCP 12)라고 부른다.
이 부분이 왜 중요한가? 베이스 스탠다드의 새로운 에디션이 작년에 발표가 됐다. 여기에 새로운 모델이 포함되어 있다. 여기에는 4차, 5차 모델을 보기 위한 Extend 모델이 포함이 됐다. TADI(Contribution of Timeless, Authenticity, Data Integrity errors)가 그것으로, 이것은 프로토콜의 안정성을 평가하는 모델이 바뀌었다는 의미가 된다. 한마디로 안전 관련된 프로토콜을 승인하는 것이 더 어려워졌다는 의미다. 그러니까 세이프티 프로토콜이 새로운 법률요건을 충족시켜야 된다는 의미다. 그런데 다행히도 Safety over EtherCAT은 변화가 없다. EtherCAT만 제외하고 나머지 프로토콜들은 바꿔야 된다는 의미다. 프로토콜의 경우에는 최저 세이프티 풀케이버가 40바이트에서 60바이트까지 늘어났다. EtherCAT은 세이프티 풀케이버 사이즈가 여전히 60바이트로 변화가 없다. 그러니까 지속적이라는 의미다. 이는 FSoE에 있어서 좋은 소식이다. EtherCAT의 세이프티 프로토콜은 안정적이라는 뜻이다.
적합성 테스트
두 개의 버전이 있어서, 최신버전으로 테스트를 해야 한다. 적합성 테스트 툴은 단순히 사양에 대한 테스트가 아니고, EtherCAT 안전 디바이스를 만드는 데 대단히 필요한 부분이다. 새로운 버전은 올해 3월에 만든 2.3버전이다. 툴에는 서보 드라이브 테스트 기능을 추가했고, FSoE 관련된 안전을 추가했고, 다양한 세미테크니컬 워킹그룹의 프로파일을 추가했다. 안전을 위한 프로파일, 예를 들어 온도제어기라든지 칠러 등에 대해 추가가 됐다. 이것이 전체 테스트 파일의 일부로 포함이 되어있다.
진단 탭이 추가됐다. 250개의 진단 메시지까지 저장할 수 있다. 적합성 테스트를 위해 사용되는 것은 아니지만 진단정보를 디바이스에서 볼 수 있게 된다. 그래서 혹시 디바이스를 가지고 일을 하는데 이슈가 생기게 되면 저장을 하게 되고, 진단이력을 만들고 있기 때문에 전체적인 개발 프로세스에 큰 도움이 된다.
또 진단 종류별로 필터링을 할 수 있게 된다. 예를 들어 알림이라든지 이상반응 같은 것들을 진행할 수 있고, 또 AoE(온라인)를 만들었다. ADS가 실제 어플리케이션에 사용이 되고 있고, ADS를 사용해서 디벨롭먼트를 하기 위해서는 스파링 파트너같은 것이 필요한데, 적합성 툴이 스파링 파트너가 되고 있다. ADS를 EtherCAT 커멘드로 전달하고 다시 피드백을 받을 수 있게 된다. 이것이 ADS 피쳐를 수동으로 테스트할 때 활용될 수 있다.
파일 억세스(File Access)를 오버 이더캣(Over EtherCAT)으로 사용할 수 있게 된다. 탭이 추가됐다. 예를 들어서 업데이트를 디바이스에 다운로드 받을 때는 더 이상 TwinCAT을 사용할 필요가 없이 적합성 테스트 툴을 사용할 수 있다. 디바이스를 선택해서 다운로드나 업로드를 File of EtherCAT(FoE)을 통해서 활용할 수 있게 된다.
FoE 온라인이라는 새로운 탭은 적용을 위한 카운터파트 역할을 하게 된다. 뿐만 아니라, 리모트 컨트롤 인터페이스에서도 사용될 수 있다. CTT에 리모트 컨트롤 인터페이스를 위해서도 사용할 수 있게 되고, 테스트 환경에서도 구독이 가능하다. 따라서 툴을 열지 않고서도 원격으로 제어가 가능하게 되고, 많은 밴더들이 툴을 안에서 사용하는 경우가 많이 있다. 그렇게 되면 자동적으로 적합성 테스트가 진행이 될 수 있도록 원격제어를 할 수 있게 된다. 이 인터페이스는 펌웨어를 디바이스에서 할 때도 활용할 수 있기 때문에, 더 이상 펌웨어를 직접 작성할 필요가 없다.
또 하나의 새로운 탭은 네트워크 어댑터로서 EtherCAT 마스터다. 네트워크 인터페이스 카드에서도 읽을 수 있게 되고, PHY(파이) 칩에서도 정보를 받을 수 있게 된다. 파이가 무엇을 하는지 볼 수 있게 되고, 하드웨어 단에 문제가 있는지 볼 수 있게 된다. 따라서 개발과정에 대단히 도움이 된다.
이와 함께 원격 인터페이스를 위한 새로운 스크립트(Scripts)가 마련이 됐다. 스크립트 기반의 제어 기능을 통해 액세스가 가능한 모든 CTT 기능은 물론, 이를 통해 모든 디바이스 승인 테스트 시 자동화된 테스트 과정이 통합되도록 할 수 있다.
EtherCAT 구현 자체를 지원하는 다양한 기능 이외에도, CTT의 핵심 기능, 즉, 테스트 가능 범위도 확대됐다. 표준 테스트 세트에 다수의 반도체 디바이스 프로파일이 새롭게 추가됐다. IEC 61800-7-2 (CiA DS402 급)에 따른 Servo-Drive-Profile 역시 크게 늘어났다.
또한 FSoE 세팅에 변경이 생기고, Crc32가 추가됐다. FSoE 디바이스 경우에는 헤시태그가 매칭이 되어야만 구동이 된다. 이것은 안전성과 관련된 개발에도 도움이 많이 된다.
또 결과를 엑스포팅할 수 있는데 엑셀이 아니어도 엑스포팅을 할 수 있다. 과거에는 엑셀파일로만 엑스포트가 됐는데, 이제는 CSV나 엑셀 xlsx도 가능하다. 따라서 로그 테스트를 마이크로소프트 없이도 할 수 있다. CSV를 이용해서 데이터 기반의 엔트리도 테스트 환경에서 진행할 수 있게 된다.
이와 함께 원격 인터페이스를 위한 새로운 스크립트(Scripts)가 마련이 됐다.