







프로젝트 팀: OST의 ICE(Computational Engineering) 협회 연구원, Christian Egger. ICE 교수, Christoph Würsch 박사. R&D 엔지니어 Robin Vetsch (왼쪽부터) © Robin Vetsch
이번 어플리케이션에서의 국제적인 체결기술 전문 기업은 매우 다양한 종류의 앵커볼트를 생산한다. OST(Ostschweizer Fachhochschule, 스위스 동부 지역의 응용과학 대학)의 Buchs 캠퍼스에서 학사 논문의 일부로 기존 머신 데이터로부터 인클로징 품질과 관련된 금속 슬리브의 실시간 확인을 위한 프로젝트가 진행됐다. 그 결과, Beckhoff의 TwinCAT Machine Learning (트윈캣머신러닝)소프트웨어의 ML(Machine Learning)이 적합한 솔루션임이 증명되었다.
기계식 앵커볼트의 필수 구성요소는 볼트, 와셔, 육각 너트, 금속 슬리브이다. 슬리브와 드릴 구멍 벽 사이에서 작용하는 마찰력으로 인해 사용시 충분한 접착력이 보장된다. 드릴 구멍의 접착력에 필요한 수직 항력을 위해, 슬리브는 드릴 구멍과 함께 금속 볼트의 원뿔형 헤드에 의해 벌려진다.
프로젝트의 목표
이 프로젝트는 OST의 Bachelor of Science System Technology 학위 과정의 일환으로 R&D 엔지니어인 Robin Vetsch가 진행하고 있다. 해당 프로젝트는 사전 제작된 천공 슬리브가 앵커볼트의 원뿔형 목 부분을 둘러싸는 인클로징 프로세스에 집중하고 있다. 사전 제작된 금속 슬리브는 새로운 제조 컨셉을 사용하여, 서보 실린더 2개를 통해 볼트의 목 주변에서 닫힌다. 2개의 서보 실린더는 Beckhoff 서보 드라이브, AX5206에 의해 정교하게 제어된다.
해당 논문의 목표는 머신러닝 기법을 사용하여 자동화 품질 검사 절차를 개발하는 것이었다. 품질 검사는 오직 기존의 머신 데이터 요소들만 사용된다. 즉, 추가적인 센서 설치가 필요 없다. 과거 볼트의 슬리브 인클로저 품질은 대부분 게이지를 이용하여 수동으로 확인해왔다. 이제는 모든 인클로저가 품질 사양 내에서 서로 다른 세 가지(느슨함, 알맞음, 타이트함) 등급으로 분류될 수 있다. 뿐만 아니라, 인클로징 슬리브의 주요 기하학적 데이터(슬리브 폭, 높이, 개구부)가 회귀 분석로 예측 가능하다. 인클로징 절차에 대한 100% 검사는 초기 단계에서 추세나 편차 검출이 가능하다.
품질 기준점으로는 원통형 테스트 슬리브가 사용됐다. 슬리브로 둘러싸인 볼트는 반드시 이 게이지에 정확하게 맞아야 한다. 즉, 슬리브가 볼트를 너무 타이트하게 조이거나 느슨하지 않아야 한다. 인클로징 프로세스의 다양한 FEM 시뮬레이션을 기반으로 인클로저 결과에 유의미한 영향을 미치는 파라미터를 정의하였다. 이 정보에 맞춰 수많은 인클로징 테스트가 진행됐고, 두 서보 실린더의 중요 실시간 데이터가 TwinCAT Scope 소프트웨어 오실로스코프로 기록되었다. 기록된 사항에는 서보모터의 전력소모, 토크, 지연 오차 등이 포함된다.
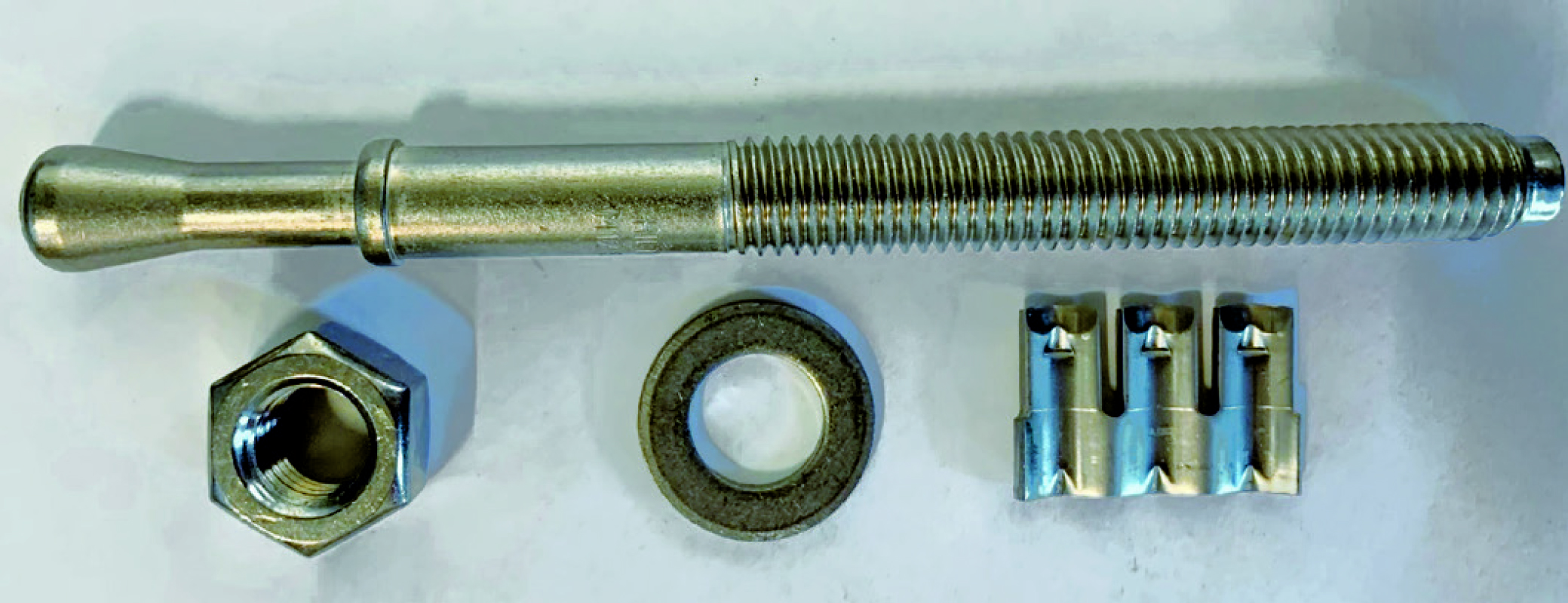
앵커볼트 구성요소 © Robin Vetsch
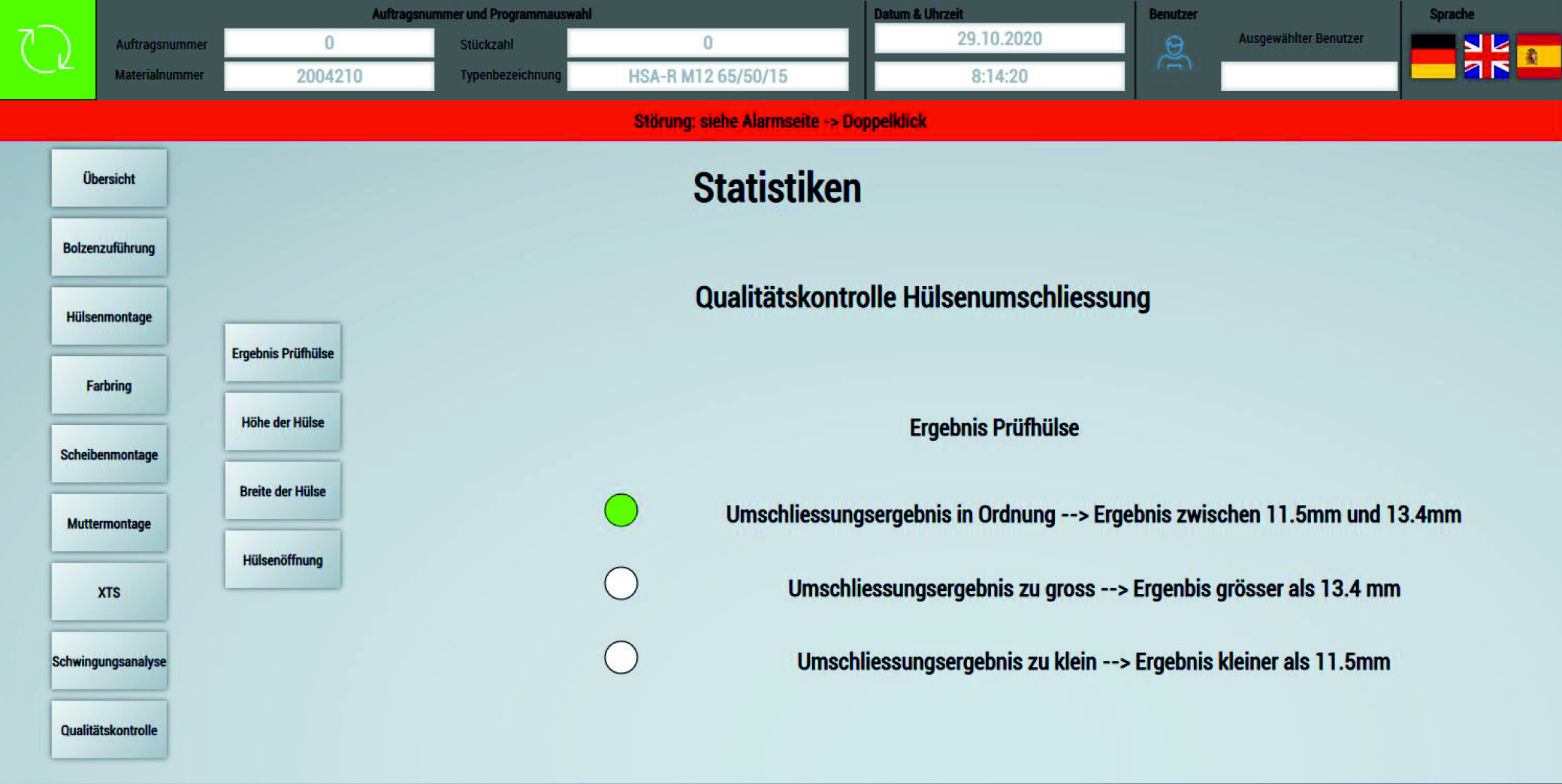
테스트 통계의 시각화 © Robin Vetsch

슬리브 인클로저의 품질 기준 가운데 하나로 표현된 슬리브 너비 © Robin Vetsch
머신 제어기 내부 ML 통합
전통적인 ML 프레임워크 내에서 (이 경우에서는 Scikit Learn) 기록된 테스트 데이터를 기반으로 매우 강력한 머신러닝 회귀 모델을 개발 및 트레이닝 시켰다. ML 프레임워크에서의 이 같은 작업은 데이터 준비와 선택, 적합한 ML 알고리즘 모델링 및 트레이닝과 평가를 포함한다. 이러한 엔지니어링 단계의 결과는 트레이닝된 ML 모델로서 입력 및 목표 데이터 간의 관계를 나타낸다. TwinCAT 3에서 상기 트레이닝 된 ML 모델의 배포 인터페이스는 데이터에 대한 인터페이스만큼 개방적이다. 여기서, ONNX(Open Neural Network Exchange) 파일 형식이 표준으로서 지원된다.
프로젝트의 다음 단계는 트레이닝 된 ML 모델을 실시간으로 머신 제어기에 통합시키는 것과 관련되었다. 이를 위해 TwinCAT 3 Neural Network Inference Engine (TF3810)을 사용한다. Robin Vetsch에 따르면 몇 가지 코딩 라인만을 이용하는 간단한 방법으로 ONNX 포맷으로 변환된 모델이 TwinCAT 실시간 환경에서 실행될 수 있었다고 한다. 이 같은 TwinCAT 3 ML 모델의 배치를 위해서는 출력된 ML 모델을 이진 포맷(.bml)으로 변환하여 타겟 시스템(임베디드 PC 또는 컨트롤 캐비닛 PC)에 저장한다. .bml 파일 로딩 후, 런타임 모델이 정밀하게 자체 구성되어 ML 모델 추론에 필요한 정확한 컴퓨팅 연산들이 산업용 PC의 CPU에서 효율적으로 진행되도록 한다. 이를 통해 결과 모듈이 실시간 추론 엔진으로서 TwinCAT 3에 매끄럽게 통합하고 TwinCAT 3의 규정된 모든 프로그래밍 방식을 지원하도록 보장한다(PLC, C/C++, 순환형 작업을 통해 직접적으로 모듈 호출).
프로젝트 결과
앵커볼트 품질 검사용으로 트레이닝된 ML 모델을 실행함으로써, 인클로징 슬리브의 높이 및 너비가 +/-0.15 mm의 정확도로 측정될 수 있었는데, 이는 2 % 미만의 상대오차와 동일한 수준이다. 슬리브 개구부는 10 %의 상대 오차로 측정될 수 있다. 단순 근사치로는, 사용된 테스트 슬리브가 인클로징 슬리브의 높이 및 너비를 충분히 구체적으로 나타냈다고 판단할 수 있다. 이러한 목적으로 MLP(Multi Layer Perceptron) 방식의 신경망을 이용하였다. 모델의 출력 변수들은 슬리브의 너비, 높이, 개구에 대한 추정치이다. PLC에 정의된 단순 한계치를 통해 회귀 분석뿐만 아니라 간단한 분류작업을 수행할 수 있다.
Robin Vetsch에 따르면, 이 회사는 해당 데이터 기반 품질 검사 덕분에 많은 이점을 얻었다고 한다. 이 같은 방법으로 100% 인라인 품질 검사를 추가 센서나 테스트 스테이션 없이 수행할 수 있다. 뿐만 아니라, 각 인클로징 과정의 기존 데이터로 보다 상세한 평가를 할 수 있다. ML 솔루션의 실시간 성능을 통해 검출된 불량 부품을 가능한 한 빨리 추출하는 방식의 실행에 최적인 기반을 제공한다. 마지막으로 TwinCAT HMI를 통해 상세하게 추세를 나타냄으로써 필요한 경우, 사용자의 즉각적인 대응이 가능하다.
링크:
www.ost.ch
www.beckhoff.com/machine-learning