









숙련된 인력 부족은 건설업계에서도 심각한 문제다. 네덜란드뿐만 아니라 오스트리아에서도 자격을 갖춘 벽돌공을 찾기가 어렵다. 현지 기업인 Ropax는 벽돌 쌓기 작업에 로봇 공학을 사용하는 아이디어를 채택하고 이동식 벽돌쌓기로봇 ‘Pax’를 개발했다. 이는 현장의 혹독한 환경 조건에서 ‘작업’을 수행하며 프로세스에서 매우 유연하게 사용될 수 있었다. 이는 여기에 사용된 강력한 기술에 의해 가능했다. 복잡한 자동화 작업은 잘츠부르크에 본사를 둔 제조업체인 Sigmatek의 ‘S-Dias’ 시스템에 의해 제어되었다. 이 시스템은 콤팩트한 하드웨어, 모듈식 소프트웨어 및 개체지향적인 프로그래밍 덕분에 이러한 목적에 이상적으로 적합했다. 네덜란드 Sigmatek 솔루션 파트너인 Sigmacontrol은 까다로운 애플리케이션 생성을 지원했다.
티나 스트리트버거(Tina Streitberger), Austromatisierung 20203년 6월호 독일어판에서 발췌, 사진 시그마테크
Ropax는 건설 로봇 개발을 전문으로 하는 젊은 회사이다. 초점은 벽돌 작업의 자동화에 있었다. ‘Pax’ 프로젝트는 Ropax 회사 창립자인 Jelle Overtoom과 Jeroen-Bas Menschaar, 그리고 Ropax의 상업 이사인 Colin Gort에 의해 개발되었다. Overtoom은 초창기를 이렇게 회고했다. “제가 이 방향으로 가고 싶었을 때는 주택 부족이 지금처럼 큰 문제는 아니었습니다. 하지만 새로 들어오는 벽돌공보다 은퇴하는 벽돌공이 더 많다는 것은 업계에서 잘 알려진 사실입니다. 그리고 유럽의 많은 사람들처럼 네덜란드에서도 벽돌 외관을 갖춘 작은 집에서 살고 싶어합니다.”라고 그는 웃으며 말했다. 철저한 시장 조사 끝에 “다양한 장인과 숙련공의 전문 지식을 최대한 활용하는 것이 해결책이었다”는 깨달음이 확고해졌다. 그 결과물이 벽돌로봇 ‘팍스(Pax)’이다. 과거에도 이러한 기계를 개발하려는 시도가 이미 있었다. 그러나 지금까지 기술적 수준이나 투자 부족으로 인해 실패했었다. Colin Gort는 Ropax의 솔루션을 성공으로 이끄는 개념을 다음과 같이 설명했다 . “‘Pax’는 고정된 위치에서 벽돌 벽을 독립적으로 끌어올릴 수 있는 로봇 팔이 있는 이동식 베이스로 구성됩니다.”
 네덜란드 제조업체 Ropax의 Jelle Overtoom(왼쪽)과 Colin Gort는 소형 이동식 ‘Pax’ 로봇은 Sigmatek을 올바른 파트너를 선택했다고 확신했다 .
네덜란드 제조업체 Ropax의 Jelle Overtoom(왼쪽)과 Colin Gort는 소형 이동식 ‘Pax’ 로봇은 Sigmatek을 올바른 파트너를 선택했다고 확신했다 .
간단해 보이지만 개발 과정에서 적잖은 골치 아픈 일이 발생했다. “우리 모두가 방갈로에 살고 싶다면 쉽지만 현실은 다릅니다. 첫째, 모두가 자신만의 개성 있는 디자인을 원하고, 둘째, 모든 건설 현장도 마찬가지입니다. 예측할 수 없는 일이 늘 존재합니다. 한편, 결정적인 요인은 현장에 적응할 수 있다는 점이지 그 반대는 아닙니다.” Jelle Overtoom은 다음과 같이 덧붙였다. “우리는 벽돌을 매우 빠르게 쌓는 아이디어를 테스트했지만 이를 위해서는 여전히 특수 물질의 생산이 필요했습니다. 모르타르는 펌핑이 가능하고 저항이 낮으며 안정적이어야 하고 작업 시간이 길어야 합니다. 또한, 다른 건설 현장의 요소를 신중하게 고려해야 합니다.”
건설현장의 도전
“아마도 개발자에게 가장 큰 과제는 건설 현장에서 전문가의 작업을 자동 프로세스로 전환하는 것이었습니다. 벽돌공은 눈으로 추정하는 경우가 많지만, 로봇에는 허용 오차, 크기 차이 등 추정값이 미리 프로그래밍되어 있어야 합니다. 그러기 위해서는 올바른 소프트웨어가 필요합니다. 반복적인 과정을 자동화하는 것인데, 상황이 끊임없이 변하는 상황에서는 그게 어렵죠. 벽돌처럼 단순한 것을 가지고 단단함이나 모양의 차이, 벽돌에 나타나는 함몰 등을 생각해서 벽에 모르타르를 더 추가해야 합니다.” 라고 Jelle Overtoom이 복잡성을 설명한다.
 ‘Pax’ 석조 로봇에 대한 통찰력: 왼쪽 하단에는 톱질 장치가 있고 그 옆에는 벽돌을 쌓고 모르타르를 도포하는 로봇이 있으며 오른쪽에는 시멘트 펌핑 장치와 모르타르 공급 호스가 있다.
‘Pax’ 석조 로봇에 대한 통찰력: 왼쪽 하단에는 톱질 장치가 있고 그 옆에는 벽돌을 쌓고 모르타르를 도포하는 로봇이 있으며 오른쪽에는 시멘트 펌핑 장치와 모르타르 공급 호스가 있다.
모든 요구 사항이 충족되고 해당 프로토타입을 테스트한 후 마침내 첫 번째 고객이 확보되었다. Colin Gort는 “그 순간부터 개발이 매우 빠르게 진행되었다.”라고 회상한다. 이제 ‘Pax’를 즉시 사용할 수 있게 되었다. 그는 측정하고 돌 패턴을 만들고 배치했다.
통제가 중요하다
이제 이러한 복잡성을 작동하는 기계에 통합하기 위해 Sigmatek S-Dias 제어는 모듈식 센서와 액추에이터(종종 다른 플랫폼 및 프로토콜과 결합됨)를 통합하여 시스템의 핵심 역할을 했다. S-Dias 자동화 시스템은 포켓 형식으로 안정적이고 정밀한 제어 기능을 제공하며 높은 기계적 안정성과 진동 저항성을 갖추고 있었다. 안전은 또한 필수 시스템 구성요소였다. 세이프티 CPU, 디지털 및 아날로그 세이프티 I/ O, ‘Pax’ 석조 로봇에서 다양한 인터페이스를 갖춘 소형 S-Dias 시스템은 로봇 제어 시스템의 원활한 작동을 보장했다. ETT 764 7" 멀티터치 제어판은 스마트하고 직관적인 작동을 가능하게 했다. 강력한 EDGE3 기술 프로세서의 4개 프로세서 코어는 부드러운 (웹) 시각화를 위해 정확하게 일치하여 최적의 사용자 경험에 기여했다. Sigmatek 자동화 패키지는 모든 기능에 의해 완성되었다. 단일 엔지니어링 도구 LASAL. 특히 현대 기계 엔지니어링에서는 명확하게 구조화된 모듈식 소프트웨어가 핵심 성공 요인이었다. LASAL은 객체 지향 프로그래밍(IEC 61131-3 표준)과 그래픽 표현을 결합하여 모듈식 메카트로닉 엔지니어링을 가능하게 했다. 즉시 사용 가능한 템플릿과 기능 블록은 물론 쉬운 코드 재사용으로 엔지니어링 시간이 크게 단축했다.

플랜트의 제어 핵심은 운전실에 직접 위치한다. 세이프티 CPU 및 I/O 를 포함하는 Sigmatek 의 콤팩트하고 견고한 ‘S-Dias’ 자동화 시스템이다.
실현
EtherCAT 커플링 모듈 VBC 121 을 통해 PLC로부터 직접 명령을 받는 로봇 팔, 시멘트 펌프, 석재 공급 장치, 톱질 기계, 노즈 휠, 별도의 레이저 포지셔닝 장치, WiFi로 구성되었다. 통신 모듈 RAR 2415. Jelle Overtoom은 간단한 처리에서 Sigmatek의 제어 및 자동화 기술의 주요 이점을 확인했다 . “LASAL 라이브러리가 있는 소프트웨어 측면과 하드웨어 측면 모두에서 I/O 연결이 즉시 완료되었다. WiFi 를 통해 원격 액세스 라우터 RAR에 연결하는 센서가 있다. 이를 구성하려면 IP 주소만 입력하면 된다. 모듈형 설계는 일반적으로 매우 편리하다. 예를 들어 로봇 팔은 다음을 통해 쉽게 구성되었다. LASAL 소프트웨어와 통합된 VARAN EtherCAT 버스 커플러이다.” 기계 제작자는 항상 모든 엔지니어링을 완벽하게 제어할 수 있었다. 소프트웨어의 모든 클래스가 파생될 수 있으며 파생된 알람 버퍼는 예를 들어 MQTT를 통해 데이터베이스에 직접 알람을 보낼 수 있다.

석조 로봇 솔루션의 하이라이트는 상대적으로 긴 처리 시간을 가능하게 하는 펌핑 가능한 모르타르이다.
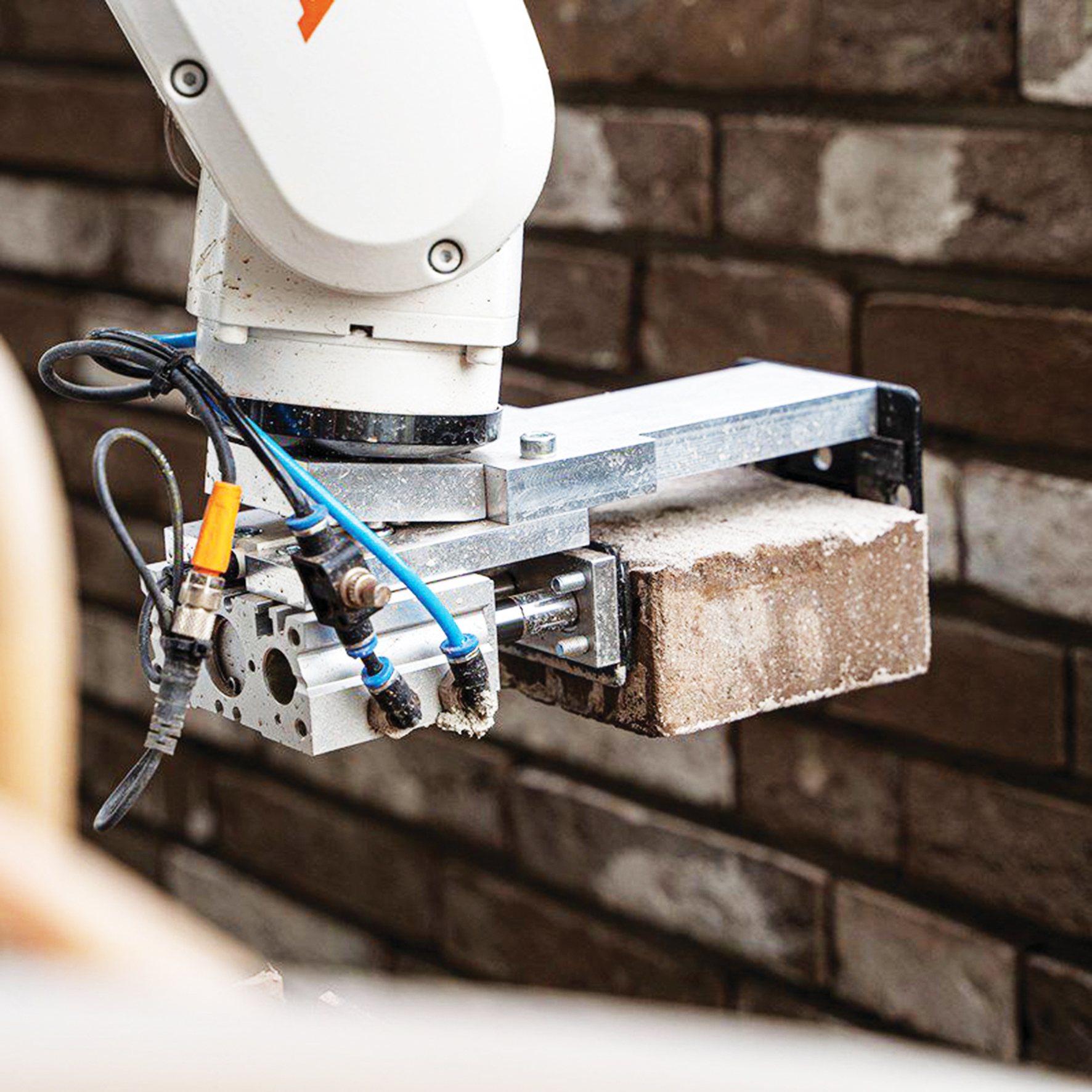
그림5. ‘Pax’ 로봇의 그리퍼 도구는 벽돌 사전 절단, 위치 지정, 모르타르 연결 등 여러 기능을 동시에 수행하는 데 사용되었다.
미래
대부분의 기술 응용 분야와 마찬가지로 ‘Pax’ 석조 로봇의 개발은 시장 출시와 함께 끝나지 않았다. Ropax가 선언한 목표는 미래에 직선 벽돌 쌓기 작업을 전적으로 로봇에게 맡기는 것이 이점이라는 것을 수많은 건설 회사에 설득하는 것이다. Jelle Overtoom은 이와 관련하여 명확한 비전을 가지고 있다. “암스테르담에는 전 세계 사람들이 보러 오는 400년 넘은 건물이 있습니다. 벽돌로 아름다운 것을 만들 수 있다면 벽돌은 시대를 초월합니다. 나의 가장 이상적인 아이디어는 간단한 석조 작업을 로봇으로 처리하는 것입니다. 이러한 방식으로 벽돌공은 자신의 전문 지식을 더욱 어려운 프로젝트에 활용할 수 있을 것입니다.”
저자 소개: Tina Streitberger는 Lamprechtshausen에 있는 Sigmatek의 마케팅 커뮤니케이션 소속
기사제공: 서보스타