








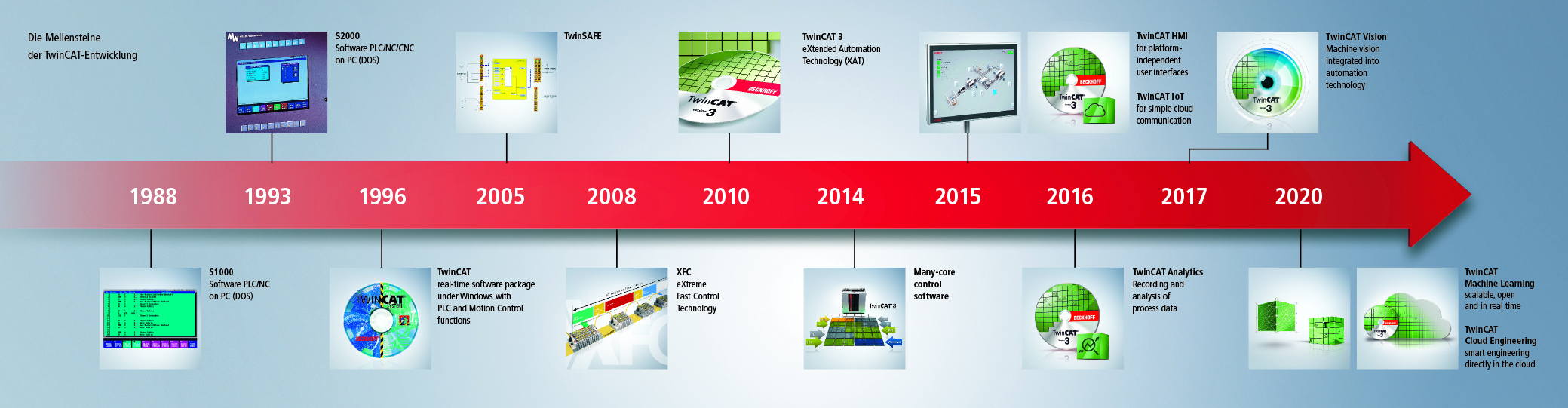
1986년 이후, Beckhoff는 PC 기반 제어 시스템인 S1000 및 S2000을 선보였다. 1990년대에 들어서는 하드웨어 플랫폼을 자체적으로 개발하기 시작했으며, Beckhoff의 자체적인 올인원 마더보드를 C2000 산업용 PC에 적용했다. TwinCAT(The Windows Control and Automation Technology)은 1996년에 처음 도입되었다. 여기서 Beckhoff는 기존의 DOS를 버리고 Windows를 채택하였으며, 하나의 소프트웨어 솔루션 내에 완전한 엔지니어링 환경을 삽입했다. 이러한 구성은 TwinCAT System Manager 상에서 이루어졌으며, PLCopen에서 확립된 바에 따라 IEC 61131- 3 에 맞는 프로그래밍이 가능해졌다. 단순한 축의 이동에서부터 연결 축, 그리고 CNC에 이르기까지 모션 제어 기능을 구현할 수 있게 되었다. 다양한 필드버스에 대한 개방성을 갖추는 것도 반드시 필요했다. 이는 일관성 있는 구성을 갖춤과 동시에, TwinCAT System Manager 내에서 진단이 가능해야만 했다.
기존의 산업용 PC와 더불어 Beckhoff는 DIN 레일 탑재가 가능한 제어 장비도 개발했다. CX1000 임베디드 PC는 각각의 임베디드 버전 내에 Windows를 갖춤과 동시에, 매우 가벼운 Windows CE 운영체제를 갖추고 있었으며, TwinCAT Runtime을 이 두 운영체제 모두에 대응하도록 제공하고 있었다. PC 기반 제어 툴킷에 있어 그다음 중요하게 대두된 구성요소는 바로 안전 기술이었다. 2005년, Beckhoff는 TwinSAFE를 선보였다. 이는 새로운 “노란색” 터미널을 갖추었으며, 그와 동시에 TwinCAT System Manager 내에 안전성 관련 엔지니어링 기능을 탑재하고 있었다. 프로그래밍 대신 간단한 그래픽 구성만으로 새로운 기계 안전성 프로젝트를 생성하는 것이 가능해진 것이다. 2007년에는 CBxxxx라 불리는 새로운 세대의 마더보드가 등장한다. 다양한 패키지로 제공되는 CBxxxx 마더보드는 시장에서 큰 성공을 거둔다. 새롭게 등장한 산업용 PC, EtherCAT, 특수 기능 I/O 터미널을 도입해, 2008년의 TwinCAT 은 응답시간을 100µs 내로 줄일 수가 있었다. 따라서 성능을 비약적으로 향상시킨 것이다.
새로운 TwinCAT의 등장으로 크게 강화된 성능
2010년에는 TwinCAT3가 출시되면서, TwinCAT의 새로운 시대가 막이 올랐다. 가장 핵심적인 기능은 Microsoft Visual Studio와의 통합을 지원한 것으로 이를 통해 Beckhoff 생태계의 IT 및 자동화 기술이 한층 더 풍부해지게 됐다. 그 결과, IT와 자동화 기술에도 동일한 방법 및 툴박스를 사용하는 것이 가능해졌다. IT는 C++에 의존한다. TwinCAT 내에서 자동화 엔지니어들이 C++도 사용 가능하다. 한 편, IEC 61131-3 제3 판에서는 PLC 언어에서 객체 지향적 기능을 지원하면서 자동화 기술이 한층 더 강화됐다. 학술 분야에서는 널리 이용되고 있는 MATLAB/Simulink가 통합되면서 지원되는 프로그래밍 언어의 폭이 다시 한번 확장됐다. TwinCAT3 에서는 TwinCAT Runtime 이 64비트 운영체제도 지원하게 되었으며, 프로세서의 멀티코어 기능 활용이 최적화되었다. 예를 들어, TwinCAT 3, 그리고 2014년 선보인 최대 40개의 코어의 C6670 산업용 서버는 측정 기술, 이미지 프로세싱, XTS 및 XPlanar 등 연산 소요량이 특히 많은 작업을 병렬로 실행할 수 있다.
1980년, Hans Beckhoff 대표는 Beckhoff Industrie Elektronik를 창립했다. 가장 최초의 프로젝트는 목재 및 창틀 건설 산업에서 사용하는 장비에 대해 Motorola 마이크로프로세서를 기반으로 한 제어 시스템을 구축하는 것이었다. 1981년부터 PC(개인용 컴퓨터)라는 용어는 점차 IBM PC 및 IBM 호환 PC를 가리키는 의미가 되었다. 다양한 변형의 x86 계열 프로세서가 사용되었으며, DOS 운영체제가 탑재됐다. 1986년에 Beckhoff는 하드웨어 및 운영체제를 개조하여 모션 제어를 구현했다. 그리고 이는 오늘날, 모듈형의 TwinCAT 3 소프트웨어 세대에까지 이어지며 혁신과 성공을 안겨주고 있다.
이후 여러 해 동안 인더스트리 4.0 은 엄청난 화두로 자리잡아 왔다. 다양한 TwinCAT IoT 제품을 선보였는데, 특히 공급자와 관련없이 클라우드에 접근할 수 있는 기능을 갖추고 있었다. 2015 년에 도입된 TwinCAT HMI 기반 기술은 다시 한번 IT에 주목하고 있었다. 표준 웹 브라우저의 기술은 과거에도, 그리고 앞으로도 HTML 및 CSS 를 중심으로 발전해 나갈 것이다. 이렇게 성공적인 기술이라면 사용하지 않을 이유가 없지 않은가? 이 기술의 이점은 다양한 툴박스가 사용 가능한 점, 그리고 운영체제에 전혀 제약을 받지 않고 어떠한 브라우저에서도 시각적인 표현을 구현할 수 있는 점을 들 수 있다. IoT 프로토콜을 통해 클라우드에 데이터를 전송할 수 있는 능력이 확보되면서, 데이터를 분석해야 하는 필요성이 대두되었다. 그 결과, 2016년 자동화 환경 내에 TwinCAT Analytics가 대두되었다. Beckhoff는 2017년에는 TwinCAT Vision을 출시했다. 기존의 머신비전 솔루션과 비교해 다양한 이점이 있었는데, 먼저 엔지니어링 툴박스 내에 완전한 통합을 이루었으며, PLC 언어로 프로그래밍이 가능하다. 또한, 알고리즘을 실시간으로 임베딩 할 수 있어, 불필요한 지연 시간이 없어졌다. 이는 이미지 프로세싱과 모션 제어를 동시에 진행할 수 있다는 것을 의미한다.
Beckhoff는 2019년에 CX7000 소형 제어기와 함께 새로운 운영체제를 발표했다. TwinCAT/RTOS 는 매우 가벼운 솔루션으로, 초소형의 제어기를 대상으로 한다. 그와 동시에 Beckhoff는 TwinCAT/BSD를 탑재한 중대형 프로세서를 대상으로 별도의 OS를 개발했다. 이들 운영체제는 모두 Windows 를 대체하는 목적이 아니라, 이를 보완하기 위한 목적으로 개발된 것이다.
2020년에는 TwinCAT Cloud Engineering 및 TwinCAT Machine Learning이 출시됐다. TwinCAT Cloud Engineering은 TwinCAT 툴을 클라우드로 옮긴 것이다. 향후에는 TwinCAT Machine Learning을 통해 모션 제어 분야에서 좀 더 높은 효율을 담보함과 동시에 가상 센서를 생성하고 대량의 데이터를 분석하는 데에 이를 이용할 수 있을 것이다.

Béla Höfig, TwinCAT 제품 매니저

Dr. Josef Papenfort, TwinCAT 제품 매니저