









TwinCAT은 종합적인 자동화 소프트웨어 패키지로 다양한 어플리케이션에서 활용할 수 있는 여러 구성요소를 제공한다. 한편으로 이는 어플리케이션의 구성 및 프로그래밍에 필요한 엔지니어링 제품을 포함하며, 또 다른 한 편으로는 소위 말하는 런타임 제품도 제공한다. 런타임은 다양한 운영체제에서 실시간 환경의 기초를 제공한다.
다양한 필드버스의 입력 및 출력에 대한 쿼리 및 구성이 이루어지도록 하는 작업은 런타임 환경 내에서 제공된다. 필요한 경우 표준 IEC 61131-3 언어로 작성된 PLC를 추가할 수도 있다. 뿐만 아니라, 여러 개의 PLC 를 하나의 PC 상의 하나의 TwinCAT 시스템에서 동시에 사용할 수도 있고, 몇 가지 작업을 산업용 PC의 여러 코어에서 실행하도록 하는 것도 가능하다. 이러한 방법으로 컴퓨터의 성능과 대역폭을 최상의 방식으로 활용할 수 있다.
단순한 점과 점 사이의 동작뿐만 아니라, 캠 플레이트, 커플링 동작을 위해 다수의 축을 지니는 모션 제어도 지원된다. TwinCAT NC I 및 TwinCAT CNC 을 사용하면 보간 동작을 실현할 수 있다. 추가적으로, 로봇은 TwinCAT 내에서 상응하는 키네마틱 변형을 통해 손쉽게 움직일 수 있다.
프로그래밍 및 기능의 통합
대부분의 TwinCAT 사용자는 전통적 PLC 프로그래밍 방식, 즉, IEC 61131- 3 언어를 사용하여 프로그래밍을 수행한다. 필요한 경우 MATLAB이나 MathWorks의 Simulink뿐 아니라 C 또는 C++와 같은 상위 언어를 사용하는 것도 가능하며, 이러한 언어를 매끄럽게 통합시키는 것이 가능하다. 이는 이들 언어로 작성한 언어를 TwinCAT 실시간 환경에서 실행할 수 있다는 것을 의미한다. 안전 분야에서는 TwinCAT Safety Logic이 제공되고 있다. 따라서 Safety C 와 같은 필수 언어로 안전 어플리케이션을 개발하고, 이를 TwinCAT 실시간 환경에서 안전하게 실행할 수 있다는 것을 의미한다.
기본 TwinCAT Engineering을 확장시켜 주는 엔지니어링 툴박스의 경우 디지털 및 아날로그 신호를 그래프 형식으로 나타낼 수 있는 옵션을 제공하는 TwinCAT Score를 포함시킨다. 추가적으로 동 제품은 ADS Monitor 와 Realtime Monitor 와 같은 진단 툴도 포함하고 있다. TwinCAT HMI는 Visual Studio에 통합되어 있는 강력한 엔지니어링 환경을 제공한다. 여기서는 간단한 그래픽 방식을 사용해 간단하게 시각화를 구현해 테스트하는 것이 가능하다. 시각화가 준비가 된 경우, 이는 HMI 서버를 통해 대상 장비로 전송되며, 이를 통해 실행된 후 임의의 웹브라우저를 통해 내용을 화면에 표시한다.
다양한 TwinCAT 측정 기술 제품을 통해 머신빌더 또는 시스템 통합 업체를 대상으로 측정값을 포착 및 분석할 수 있도록 해준다. 예를 들어 TwinCAT Analytics의 경우에는 그래픽 구성 작업을 쉽게 수행할 수 있도록 해 준다. TwinCAT Analytics 는 통상적으로 서버상에서 구동하거나, 클라우드 내에서의 가상 기계를 통해 구동되는 경우도 있다. 한편으로, TwinCAT Condition Monitoring 은 통상적으로 대상 장비에서 지속적으로 실행되는 어플리케이션에 해당한다. 넓은 의미에서 보면, 측정 기술에는 머신러닝 분야의 TwinCAT 제품도 포함된다. 이는 상대적으로 새로운 기술로서 측정된 수치를 분석하기 위한 용도로 사용하거나, 기계 프로세스를 자동으로 최적화하기 위한 용도로 이용된다.
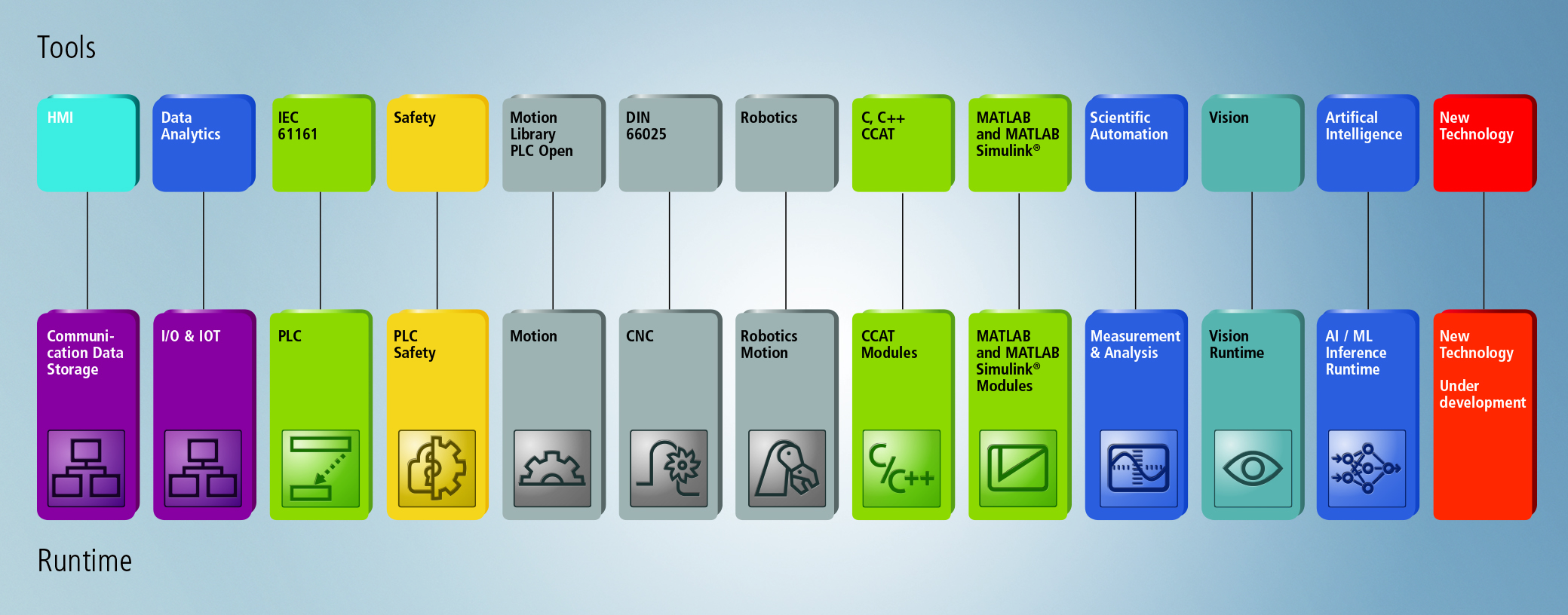
TwinCAT은 모듈형 자동화 소프트웨어 패키지로 표준 제어 기능에 로봇공학, 머신비전, 인공지능 등의 추가 기능을 수월하게 결합시켜 준다.
제어 모듈은 TwinCAT Controller Toolbox에서 확인할 수 있다. 온도 제어 디바이스는 특수 제어 프로세스에서 사용이 가능하다.
TwinCAT Motion Control에서는 동작의 구성, 파라미터화, 프로그래밍뿐만 아니라 커미셔닝도 가능하다. 간단한 A-to-B 동작에서는 TwinCAT PTP가 캠 플레이트 및 기어 커플링 기능을 구현하기 위한 용도로도 사용될 수 있다. TwinCAT NC I은 보간 동작을 제어하기 위한 용도로 사용된다. 최대 3 개 축을 제어할 수가 있으며, 레이저 절단기 등에서 사용할 수 있다. TwinCAT CNC 패키지는 다양한 확장 기능을 지원하여, 다양한 종류의 공작 기계에 사용이 가능하다.
통신 표준 지원
기계 및 시스템은 다른 기계나 MES/ERP 시스템과 서로 데이터를 교환해야 하는 경우가 자주 발생한다. 이러한 목적을 위해 여러 가지 시스템 및 프로토콜이 제공된다. TwinCAT OPC UA는 그중에서도 단연 널리 사용되고 있는 프로토콜로, 이와 같은 맥락에서의 기계 연결을 위하여 사용된다. 예를 들어 윈드터빈을 연결하기 위해서는 산업별 원격 제어 프로토콜을 반드시 준수해야 하며, 그와 동시에 TwinCAT 소프트웨어 제품에서 이를 지원해야 한다.
TwinCAT 내에서 머신비전과 산업용 이미지 프로세싱을 통합하는 것은 상대적으로 새로운 개념이다. TwinCAT Vision은 TwinCAT Engineering의 카메라를 설정 및 커미셔닝하기 위해 사용된다. 이후, 카메라의 이미지는 GigE Vision 통신 표준 IPC로 전송이 이루어진 후 직접적으로 PLC 내에서 처리된다. 이러한 목적으로 약 600개의 알고리즘이 PLC 라이브러리 내에서 제공된다. 이는 일상적인 PLC 프로그래밍 언어로 머신비전 프로그래밍을 구현할 수 있도록 해 준다.
이와 같은 솔루션 이외에도, 다른 특수 제품 및 기능도 특수한 산업 분야를 대상으로 제공되고 있다. 예를 들어 윈드터빈 에너지, 플라스틱, 엔터테인먼트, 포장, 프로세싱, 빌딩 자동화 등이 이러한 분야에 속한다.

Béla Höfig, TwinCAT 제품 매니저

Dr. Josef Papenfort, TwinCAT 제품 매니저